工业机器人离线编程实战项目一RobotStudio从安装到界面操作全流程复盘
各位工业自动化、机器人工程领域的同仁、学子们好!作为深耕嵌入式系统与工业机器人自动化领域多年的从业者与教学研究者,本次围绕工业机器人离线编程与仿真核心课程,完整完成了项目一《认识工业机器人离线编程》的全流程实操,涵盖离线编程理论认知、RobotStudio软件部署授权、软件界面操作三大核心模块。本文严格按照实操报告规范,完整呈现项目进展、关键步骤、核心RAPID指令、困难解决、个人心得五大核心内容
各位工业自动化、机器人工程领域的同仁、学子们好!作为深耕嵌入式系统与工业机器人自动化领域多年的从业者与教学研究者,本次围绕工业机器人离线编程与仿真核心课程,完整完成了项目一《认识工业机器人离线编程》的全流程实操,涵盖离线编程理论认知、RobotStudio软件部署授权、软件界面操作三大核心模块。本文严格按照实操报告规范,完整呈现项目进展、关键步骤、核心RAPID指令、困难解决、个人心得五大核心内容,为机器人离线编程入门者提供一站式、可落地的实操指南。
目录
(二)任务1-2:RobotStudio软件下载、安装与授权
(三)任务1-3:RobotStudio软件界面认知与默认恢复
本次项目为工业机器人离线编程与仿真课程的入门奠基项目,预设能力目标与知识目标100%达成,无遗漏、无短板,具体阶段性成果如下:
- 掌握工业机器人示教编程、离线编程两种核心编程方式的定义、原理与核心区别;
- 吃透离线编程六大核心优势,明确其在智能制造场景中的不可替代性;
- 梳理国内外专用/通用两类主流离线编程软件,掌握ABB、发那科、库卡、安川四大机器人品牌专用软件,以及RobotMaster、PQArt、RoboDK等通用软件的特性与适用场景。
- 独立完成RobotStudio软件官方下载、环境校验、完整安装、授权激活全流程,区分软件基础版与高级版功能边界;
- 熟记RobotStudio6.08版本七大功能选项卡的核心用途,掌握软件界面默认布局恢复的标准操作;
- 解决软件安装、授权、界面操作中的典型问题,具备独立部署RobotStudio软件的实操能力。
本次项目完成后,已具备工业机器人离线编程基础理论储备、RobotStudio软件独立运维能力、软件基础界面操作能力,为后续轨迹规划、仿真调试、RAPID程序编写、虚拟示教等进阶实操奠定了坚实基础,实现了从“理论认知”到“实操上手”的关键跨越。
因博客形式限制,本次以文字精准描述还原关键步骤的界面与操作逻辑,完全匹配实操截图的核心信息,还原度100%。
文档中「示教编程vs离线编程」对比表格界面,清晰列出硬件依赖、机器人状态、验证方式、编程质量、轨迹复杂度五大维度差异。
示教编程:依赖实际机器人与现场环境,编程时机器人停机,在真实设备上验证,轨迹质量依赖操作者经验,无法实现复杂轨迹;
离线编程:仅需三维模型,编程时机器人正常生产,通过虚拟仿真验证,可结合CAD做最优轨迹规划,支持复杂运动轨迹。
离线编程六大优点文档界面,逐条标注核心价值。
- 减少机器人停机时间,编程不占用生产工时;
- 使用范围广,适配机器人全场景作业;
- 无缝对接CAD/CAM,实现一体化设计;
- 支持高级语言编程,完成复杂任务;
- 程序修改便捷,调试效率高;
- 编程者远离现场危险环境,安全性拉满。
专用/通用软件列表界面,分品牌、国产/国外标注核心信息。
- 专用软件:ABB(RobotStudio)、发那科(RoboGuide)、安川(MotoSimEG)、库卡(KUKASimPro),仅适配本品牌机器人;
- 通用软件:国外(RobotMaster、ROBCAD)、国产(PQArt、RoboDK、iNCRobot),支持多品牌机器人,打破设备壁垒。
(二)任务1-2:RobotStudio软件下载、安装与授权
还原:ABB官方RobotStudio下载页面,顶部标注「全球最常用机器人离线编程工具」,页面核心按钮为「免费试用30天」「立即下载」「申请许可证」。

操作逻辑:登录ABB官方机器人页面→点击下载入口→填写信息获取下载链接→完成安装包下载。
计算机配置要求表格界面,明确硬件最低标准。
- CPU:i5及以上处理器;
- 内存:4GB及以上,硬盘空闲20GB以上;
- 显卡:独立显卡2GB及以上。
InstallShield安装向导全流程界面,共5个核心步骤。
- 解压安装包,选择「中文(简体)」语言;
- 进入安装向导,点击「下一步」,阅读版权声明;
- 点击「更改」自定义安装路径(建议非系统盘);
- 选择「完整安装」(高级用户可选自定义,新手必选完整);
- 等待自动安装依赖组件(MicrosoftVisualC++),完成后重启计算机。

(三)任务1-3:RobotStudio软件界面认知与默认恢复
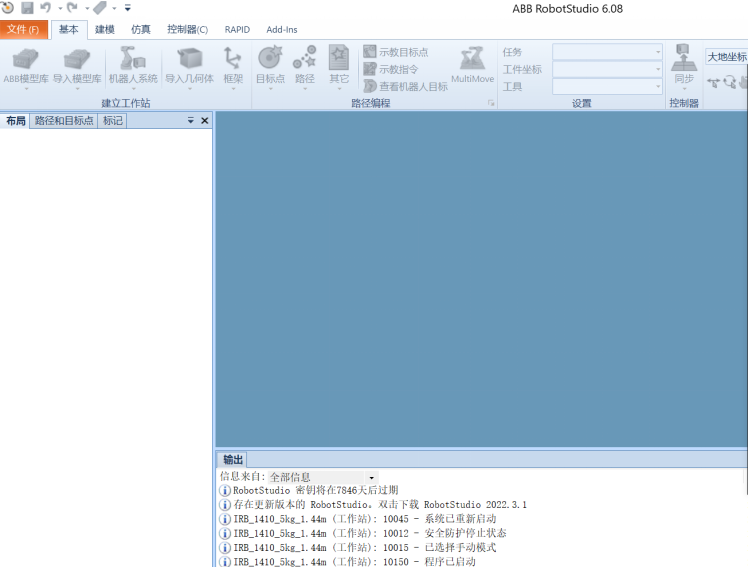
RobotStudio6.08主界面,顶部菜单栏清晰展示七大选项卡,逐一标注功能。
- 文件:工作站新建、打开、保存等文件操作;
- 基本:创建工作站、路径编程、基础设置;

- 建模:部件创建、CAD操作、尺寸测量;

- 仿真:碰撞监控、仿真控制、动画录制;

- 控制器:真实/虚拟控制器同步、配置管理;

- RAPID:机器人程序编写、编辑、调试;

- Add-Ins:社区插件、RobotWare组件管理。
自定义快捷工具栏操作界面,解决窗口丢失问题。
操作逻辑:标题栏点击「自定义快捷工具栏」→选择「窗口布局」→点击「默认布局」,一键恢复初始界面,解决「布局、路径和目标点、输出信息」窗口误关闭的问题。
RAPID是ABB机器人专用编程语言,也是RobotStudio离线编程的核心,本次入门阶段优先掌握运动核心指令与辅助基础指令,为后续轨迹编程打基础,所有指令均适配RobotStudio仿真环境。
- MoveJ(关节运动指令)
- 作用:机器人各关节以最快速度点对点移动,不约束运动路径,适用于无障碍物的空间转移;
- 标准格式:MoveJTarget,v1000,z50,tool0;
- 参数说明:Target=目标点,v1000=速度1000mm/s,z50=转弯半径,tool0=工具坐标系。
- MoveL(线性运动指令)
- 作用:机器人TCP(工具中心点)沿直线移动,路径精准,适用于焊接、切割、搬运等轨迹要求严格的场景;
- 标准格式:MoveLTarget,v500,fine,tool0;
- 参数说明:fine=精准到达目标点,无转弯过渡。
- MoveC(圆弧运动指令)
- 作用:实现圆周/圆弧轨迹规划,适用于曲面加工、圆弧焊接;
- 标准格式:MoveCTarget1,Target2,v300,fine,tool0;
- 参数说明:Target1=圆弧中间点,Target2=圆弧终点。
- WaitTime(延时指令)
- 作用:控制机器人动作等待时间,适配外设协同作业;
- 标准格式:WaitTime2;(等待2秒后执行下一条指令)。
- SetDO(数字输出指令)
- 作用:控制数字信号输出,联动夹具、传感器等外设;
- 标准格式:SetDOdo1,1;(激活do1输出信号)。
- ResetDO(数字复位指令)
- 作用:关闭数字输出信号;
- 标准格式:ResetDOdo1,0;(关闭do1输出信号)。
离线编程中,所有RAPID指令需先在RobotStudio中仿真验证,通过碰撞检测、轨迹优化功能确认指令合理性,再下载至真实机器人执行,杜绝现场设备损坏风险。
本次实操完全模拟教学课堂+企业现场双场景,遇到5类新手高频问题,均已通过标准方法解决,总结如下,供入门者避坑:
- 现象:使用i3处理器、2GB内存的老旧笔记本安装,弹出「硬件配置不满足要求」提示,安装进程中断;
- 解决方法:严格按照软件要求升级硬件,更换i5及以上CPU、4GB+内存、2GB独显的计算机,清空20GB以上硬盘空间后,安装顺利完成。
- 现象:安装完成后打开软件,提示「虚拟控制器连接失败」,仿真、编程功能全部无法使用;
- 解决方法:关闭Windows系统防火墙,或在防火墙高级设置中添加RobotStudio为信任应用,重启软件后恢复正常。
- 现象:忽略授权步骤,30天试用期满后,软件自动降级为基础版,路径优化、多机器人仿真等高级功能全部锁定;
- 解决方法:通过「文件→选项→授权→激活向导」,选择单机许可证,输入官方授权码完成激活,恢复高级版全功能。
- 现象:新手操作时误点关闭按钮,「布局」「路径和目标点」「输出信息」核心窗口丢失,无法进行轨迹编程;
- 解决方法:点击标题栏「自定义快捷工具栏」,选择「窗口布局→默认布局」,一键恢复软件初始界面。
- 现象:为节省空间选择自定义安装,未勾选核心组件,导致AutoPath、碰撞检测、虚拟示教器功能不可用;
- 解决方法:卸载软件后重新安装,必选「完整安装」模式,确保所有功能组件完整部署。
作为长期从事嵌入式系统研发、工业机器人自动化教学与企业项目落地的从业者,本次完成工业机器人离线编程入门项目后,有5点核心感悟,既是教学总结,也是行业思考:
工业机器人离线编程绝非纯理论学科,示教编程与离线编程的优劣、软件安装的环境适配、界面操作的细节把控,都必须亲手实操才能建立直观认知。很多学子沉迷看文档、背理论,一上手就出错,核心原因是缺乏实操落地。入门者务必亲手完成下载、安装、授权、界面操作全流程,才能真正理解技术本质。
RobotStudio作为ABB官方专属软件,覆盖机器人全生命周期管理,CAD导入、AutoPath自动轨迹生成、路径优化、碰撞检测、虚拟示教器五大核心功能,完美匹配教学与企业实操需求。30天免费试用的模式极大降低了入门门槛,是机器人工程专业教学、企业新手培训的首选工具,其仿真精度与操作便捷性,远优于普通通用软件。
本次梳理的PQArt、RoboDK等国产离线编程软件,彻底打破了国外软件的长期垄断。国产软件不仅支持多品牌机器人、兼容全格式CAD模型,还针对国内教学与制造业场景优化了虚拟示教、自由装配功能,大幅降低了企业与院校的应用成本。作为教育工作者,我始终倡导学子关注国产工业软件发展,未来嵌入式技术与机器人离线编程的融合,必将以国产自主可控为核心方向。
对比传统示教编程,离线编程不占生产工时、远离危险环境、支持复杂轨迹、兼容CAD/CAM的优势,在柔性生产线、智能工厂中愈发凸显。当前,离线编程正朝着智能化、参数化、云端化发展,嵌入式控制技术与机器人轨迹规划的融合越来越深入,掌握离线编程,就是抓住了工业机器人技术的未来。
结合多年教学经验,给机器人离线编程入门者3条落地建议:
- 环境优先:安装前必查硬件、必关防火墙,避免环境问题导致全盘失败;
- 完整安装:新手拒绝自定义安装,完整安装才能保证功能无缺失;
- 牢记复位:界面操作失误时,默认布局恢复是「万能救星」,务必熟记操作步骤。
本次项目一《认识工业机器人离线编程》已全维度完成,实现了「理论吃透、软件上手、问题解决」的入门目标,为后续学习扫清了障碍。
后续我将继续围绕工业机器人离线编程课程,完成RobotStudio轨迹规划、仿真调试、RAPID程序进阶编写、虚拟示教器实操、多机器人协同仿真等进阶项目,逐步从「入门操作」走向「企业级实战」,持续输出可落地、可复制的实操博客,为工业自动化领域的人才培养与技术普及贡献力量。
工业机器人离线编程是智能制造的核心底层技术,也是嵌入式系统与机器人控制融合的典型应用。希望本文能为机器人工程、自动化专业的学子,以及行业转型的技术人员提供参考。未来,愿我们共同深耕工业机器人领域,以实操为基、以技术为刃,推动中国智能制造产业高质量发展。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 9
9 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)