智能汽车防碰撞系统设计(有完整资料)
本设计是基于单片机的防碰撞小车系统,主要实现以下功能:1、检测模块:实现检测速度、检测距离、检测胎压的功能检测小车的速度使用STC89C52 单片机作为主控制器,由霍尔传感器作为测速的基本模块,在液晶显示器上显示当前速度。检测小车的距离使用 STC89C52 单片机作为主控制器,控制超声波信号的发送和接收,可以用来控制发射模块脸发脉冲的开始时间和脉宽。响应接受超声波返回时刻并进行测量和计数发射到返
资料查找方式:
特纳斯电子(电子校园网):搜索下面编号即可
编号:
T2522204C
设计简介:
本设计是基于单片机的防碰撞小车系统,主要实现以下功能:
1、检测模块:实现检测速度、检测距离、检测胎压的功能检测小车的速度使用STC89C52 单片机作为主控制器,
由霍尔传感器作为测速的基本模块,在液晶显示器上显示当前速度。检测小车的距离使用 STC89C52 单片机作
为主控制器,控制超声波信号的发送和接收,可以用来控制发射模块脸发脉冲的开始时间和脉宽。响应接受超声波
返回时刻并进行测量和计数发射到返回的时间间隔。在液晶屏显示器实时显示测量距离。“
检测小车轮胎的胎压还是使用 STC89C52 系列单片机,该功能是由压力传感器完成,检测压力会判断轮胎是否发生
异常,并且显示到液晶显示器中。若判断异常,会亮起对应的LED 指示灯。“
2、报警模块添加蜂鸣器以及 LED 指示灯,根据检测模块检测出的值来判断是否进行声光报警。在速度过快、
距离过近以及轮胎压力不足的的情况下,进行报警并且亮起对应的LED 指示灯e
3、显示模块4
使用LCD1602 来分别显示检测的速度数据和检测的距离数据,可以实时显示速度信息、与前方障碍物的距离信息。“
4、蓝牙模块4
使用蓝牙模块,将所有检测出的数据通过WiFi发送给手机,能实时接收车辆相关状态信息,能接收报警信息“
5、自动刹车模块
通过霍尔传感器测速以及超声波测距判断是否需要减速、刹车,利用电机驱动实现减速、刹车“
标签:51单片机、LCD1602、超声波测距、9150
题目扩展:快递小车、送药小车
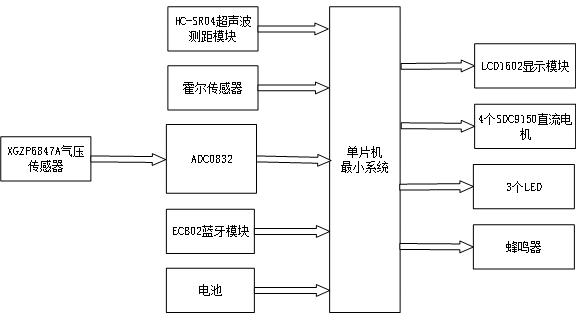
中控部分
- 核心控制器:STC89C52单片机。
- 主要功能:
- 获取输入部分的数据(如距离、速度、胎压、蓝牙指令等)。
- 对数据进行处理和分析。
- 控制输出部分(如显示数据、驱动电机、触发LED灯和蜂鸣器报警)。
输入部分
- HC-SR04超声波测距模块:
- 功能:检测汽车与前方障碍物的距离。
- 特点:提供高精度的距离测量。
- 霍尔传感器:
- 功能:检测汽车的行驶速度。
- 特点:实时监测车速。
- 气压传感器 + ADC0832:
- 功能:检测汽车轮胎的气压值。
- 特点:提供胎压监测功能。
- ECB02蓝牙模块:
- 功能:用于切换界面、调整汽车状态、设置速度、气压、距离阈值等。
- 特点:实现无线控制和参数设置。
- 电池:
- 功能:为整个系统提供电源。
- 特点:确保系统稳定运行。
输出部分
- LCD1602显示模块:
- 功能:显示当前的距离、速度、胎压值及其阈值。
- 特点:直观显示数据,便于用户查看。
- 4个直流电机:
- 功能:驱动汽车运行。
- 特点:实现汽车的运动控制。
- 3个LED灯:
- 红灯:当汽车速度过快时亮起。
- 蓝灯:当距离过近时亮起。
- 黄灯:当汽车胎压不足时亮起。
- 特点:提供视觉报警提示。
- 蜂鸣器:
- 功能:当胎压超过阈值、车速超限、距离过近时,进行声音报警。
- 特点:提供听觉报警提示。
5 实物调试
5.1 电路焊接总图
首先将电路焊接在集成板上,共有以下部分,第一部分是电源模块,将电源插座、电源开关、10k电阻和一个指示灯依次焊接,焊接好之后插入DC 电源,指示灯点亮,电源模块测试正常。第二部分是显示模块,排针焊接好后,将LCD1602显示屏插入排针。第三部分是单片机模块,本次课题使用的是STC89C52单片机。第四部分是复位电路模块,一个复位按键、10uF极性电容、10k电阻为一个模块焊接,构成复位电路。第五部分是晶振电路模块,由两个30pF瓷片电容、一个11.05926MHz晶振焊接而成。第六部分是USB转TTL模块,焊接下载接口GND、TXD、RXD,将HEX文件下载到单片机中,查看是否能下载正常,测试验证一切正常。第七部分是独立按键模块。第八部分为蜂鸣器和LED指示灯,第九部分超声波测距,第十部分是气压模块,检测当前气压,第十一部分是电机驱动车轮,第十二部分是蓝牙模块。下图5-1为焊接完整实物图:
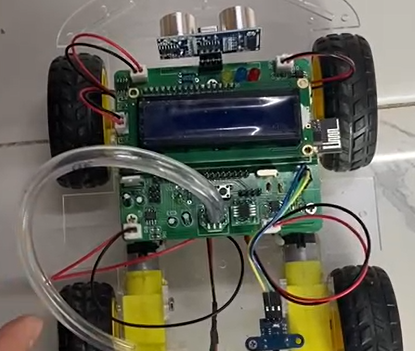
图5-1电路焊接总图
5.2 显示测试
如图5-2所示,下图为上电后,此时显示屏显示测得的速度和气压值,超声波检测的距离。

图5-2数据检测
5.3 蓝牙控制车辆
如图5-3所示,通过蓝牙可以无线控制车辆,通过蓝牙小车会将监测到的数据传递给手机。

图5-3蓝牙控制车辆
5.4 防撞测试
如图5-4所示,当小车行驶到障碍物前会自动进行停止。
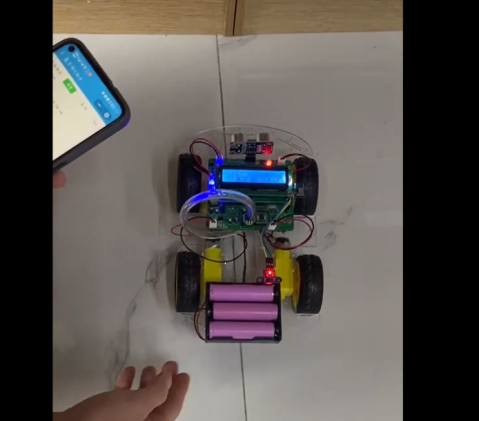
图5-4 防撞测试
6 仿真调试
6.1仿真总体设计
仿真总共包括四部分,分别为设计总体控制系统单片机,显示模块LCD1602,ADC模数转换芯片,检测气压,LED提示灯,电机驱动,超声波检测,独立按键,串口输出。如图6-1-1为整体仿真的设计。
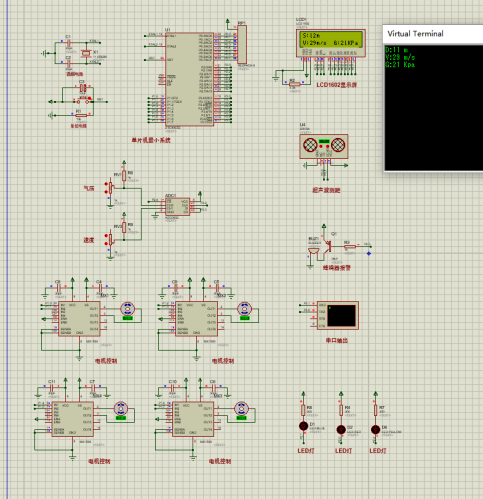
图6-1-1 仿真总览
6.2数据检测
当开始仿真之后屏幕上会显示当前检测出的气压速度路程。如图6-2-1。
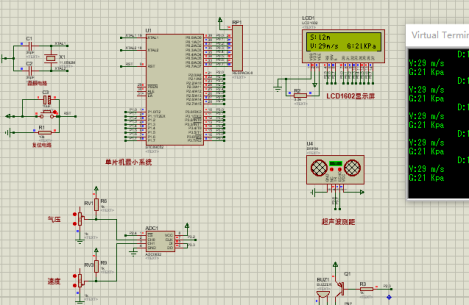
图6-2-1数据检测
6.3自动停车测试
如图6-3-1所示,通过串口输入不同的数值可以控制车辆的状态,当检测的距离过近会自动进行停车,蓝牙会发送距离近。
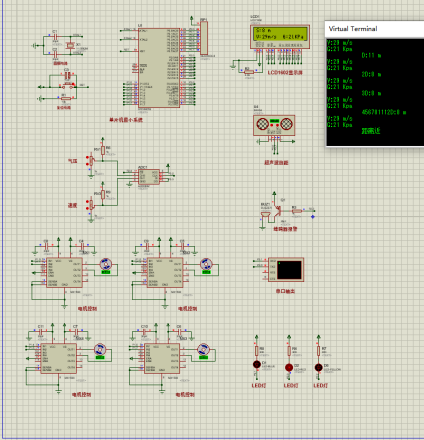
图6-2-1 自动停车测试
设计摘要:
本论文基于单片机设计了一种防碰撞小车系统,主要实现了检测模块、报警模块、显示模块、蓝牙模块和自动刹车模块等功能。检测模块利用STC89C51/52单片机和相关传感器实现了对小车速度、距离和轮胎胎压的检测,并通过液晶显示器实时显示相关数据。报警模块通过蜂鸣器和LED指示灯根据检测结果进行声光报警。显示模块使用LCD1602显示器分别显示速度和距离数据,实现了对车辆状态的实时监测。蓝牙模块通过无线将检测数据发送至手机,实现了远程监控和接收报警信息的功能。自动刹车模块利用传感器检测速度和距离,实现了根据情况自动减速和刹车的功能。该系统具有较好的防碰撞效果和实用性,可应用于小车安全保护领域。
关键词:单片机;蓝牙控制;阈值报警;自动刹车
字数:10000+
内容预览:
摘 要
ABSTRACT
1 引 言
1.1 选题背景及实际意义
1.2 国内外研究现状
1.3 课题主要内容
2 系统设计方案
2.1 系统整体方案
2.2 单片机的选择
2.3 电源方案的选择
2.4 显示方案的选择
3系统设计与分析
3.1 整体系统设计分析
3.2 主控电路设计
3.2.1 STC89C52单片机
3.2.2 晶振电路和复位电路
3.3 液晶屏显示模块
3.4 HC-SR04超声波模块
4 系统程序设计
4.1 编程软件介绍
4.2 主程序流程设计
4.3 按键函数流程设计
4.4 显示函数流程设计
4.5 处理函数流程设计
5 实物调试
5.1 电路焊接总图
5.2 显示测试
5.3 蓝牙控制车辆
5.4 防撞测试
6 仿真调试
6.1仿真总体设计
6.2数据检测
6.3自动停车测试
结 论
参考文献
致 谢
附 件

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 6
6 0
0- 0



 已为社区贡献160条内容
已为社区贡献160条内容

所有评论(0)