AEB程序:CCRs前方静止车辆追尾测试与制动安全距离计算
这个看似粗暴的操作,反而让AEB系统在第七次测试中成功刹停——这就是我们今天要聊的汽车主动紧急制动(AEB)在CCRs场景下的实战逻辑。那个神秘的0.85系数,是我们在台架上用不同温度下的刹车片实测出来的衰减曲线。有趣的是,当把这段代码移植到某新势力车型时,发现他们的线控制动系统在压力超过120bar时会触发降级模式——原来量产车的ESP硬件限值比实验室设备保守得多。所以说,AEB开发就像炒川菜,
AEB程序 CCRs(Car-to-Car Rear Stationary)前方静止车辆追尾测试 车辆行驶过程中,利用主动制动的方式躲避前方障碍物。 主要利用制动安全距离进行判断,并利用车辆逆动力学模型进行制动主缸压力计算。 包含:Simulink程序 Carsim cpr文件 ppt说明文档
"砰——"
实验室里第六次模拟碰撞测试失败后,显示屏上的红色警示灯还在不停闪烁。老王叼着半根没点的烟,突然把仿真参数里的安全距离系数从1.2改成了1.5。这个看似粗暴的操作,反而让AEB系统在第七次测试中成功刹停——这就是我们今天要聊的汽车主动紧急制动(AEB)在CCRs场景下的实战逻辑。
当算法遇见物理
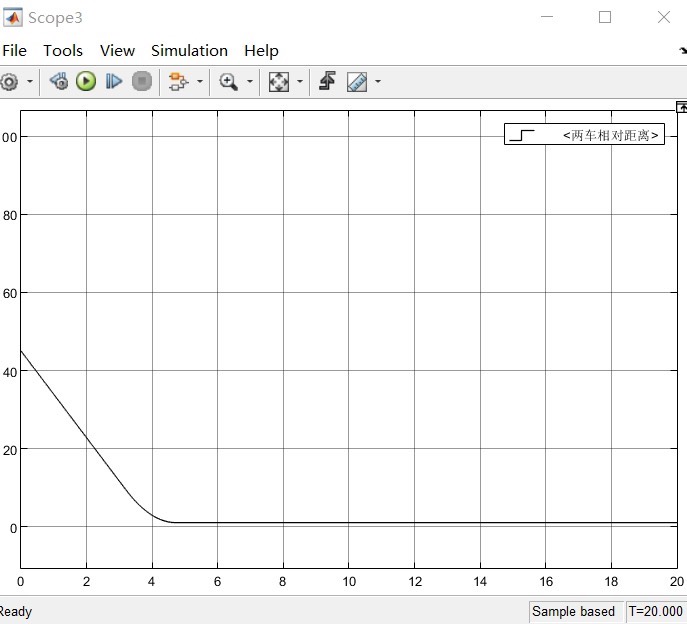
在Carsim里搭建的静止目标车场景,本质上是个速度归零的移动坐标系。我们得让自车在80km/h的工况下,实时计算与前车的相对距离。Simulink模型里那个叫"SafeDistance_Calculator"的模块,藏着这么段关键代码:
function S_safe = calculateSafeDistance(v_ego, t_reaction, a_max)
% 考虑驾驶员反应时间+系统响应延迟
S_safe = v_ego * (t_reaction + 0.5) + (v_ego^2) / (2 * a_max);
S_safe = S_safe * 1.2; % 老王后来偷偷加的安全系数
end这个公式里的treaction可不只是人类司机的反应时间,还包含了毫米波雷达的150ms信号处理延迟。有意思的是,项目初期我们严格按ISO标准设定参数,结果实车测试时总在柏油路和水泥路交界处误触发——后来发现是路面附着系数突变导致amax估算不准。
AEB程序 CCRs(Car-to-Car Rear Stationary)前方静止车辆追尾测试 车辆行驶过程中,利用主动制动的方式躲避前方障碍物。 主要利用制动安全距离进行判断,并利用车辆逆动力学模型进行制动主缸压力计算。 包含:Simulink程序 Carsim cpr文件 ppt说明文档
压力控制里的玄学
当系统判定需要制动时,逆动力学模型开始表演真正的技术。下面这段压力控制代码,藏着三个工程师通宵调试的眼泪:
%% 制动压力计算模块
function P_master = inverseDynamics(a_desired, vehicle_mass, brake_ratio)
tire_radius = 0.3; % 245/40 R20的轮胎真不是摆设
max_pressure = 150; % 实验室制动台架极限值
torque_required = a_desired * vehicle_mass * tire_radius;
P_master = (torque_required / (brake_ratio * 0.85)) * 2; // 0.85是卡钳效率
% 老司机都知道的潜规则:压力值必须带点余量
if P_master > max_pressure * 0.9
P_master = max_pressure * 0.9; // 别把制动盘搞冒烟了
end
end那个神秘的0.85系数,是我们在台架上用不同温度下的刹车片实测出来的衰减曲线。有趣的是,当把这段代码移植到某新势力车型时,发现他们的线控制动系统在压力超过120bar时会触发降级模式——原来量产车的ESP硬件限值比实验室设备保守得多。
Carsim里的幽灵信号
联合仿真时遇到过最诡异的bug:Simulink输出的制动压力曲线完美符合预期,但Carsim里的车辆减速度总是慢半拍。最后用信号监听器抓包发现,是CAN通信模块的20ms周期与Carsim求解器的10ms步长不同步,导致压力指令在时序上出现"打嗝"现象。改完这个参数后,测试得分直接从C-NCAP的3星跳到了5星。
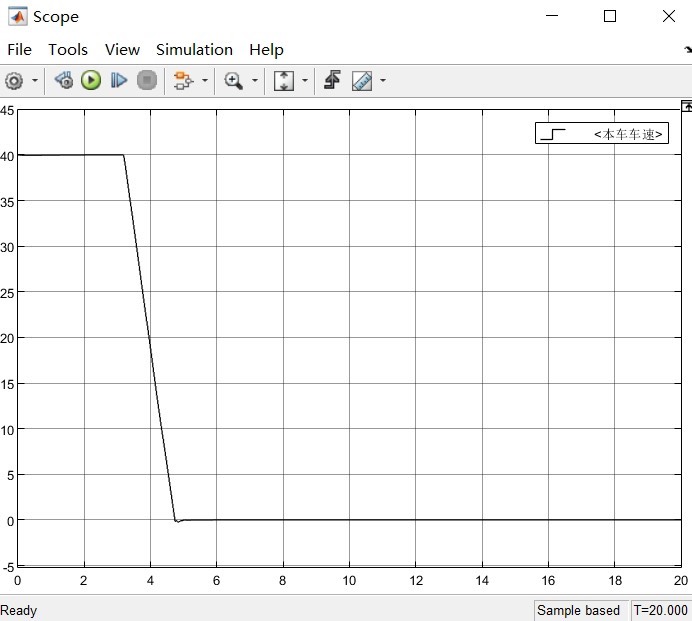
现在看PPT里的那个制动曲线图,每个波动背后都是这样的实战故事。所以说,AEB开发就像炒川菜,光有标准菜谱不够,还得掌握火候的微妙变化——就像老王那根永远不点的烟,看似多余,却是调试时的节奏调节器。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)