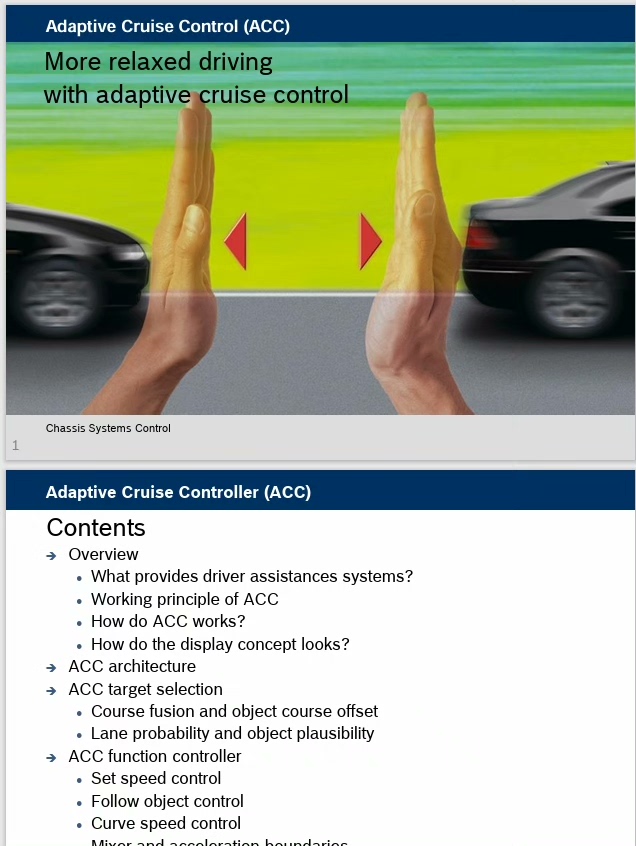
自动驾驶、无人驾驶ADAS技术及自适应巡航ACC算法说明-博世大厂量产软件文档(共127页)
博世工程师在这里用了四元数转旋转矩阵的优化算法,文档里藏着句"在ESP32芯片上运算时间控制在80μs以内",这性能优化够狠。下次用ACC跟车时,想想背后这堆状态机和补偿算法,突然觉得方向盘上的那个小图标在闪闪发光。最近搞到了博世ACC量产级软件的说明文档,这玩意真有点意思。拆开文档发现整套系统就是个精密编排的舞蹈,从毫米波雷达数据处理到油门刹车控制,每个环节都藏着魔鬼细节。自动驾驶 无人驾驶 a
自动驾驶 无人驾驶 adas 自适应巡航acc算法说明,一共127页,博世大厂的量产软件说明文档
最近搞到了博世ACC量产级软件的说明文档,这玩意真有点意思。咱们都知道ACC是现在车上的标配功能,但大厂怎么在代码层面实现这功能的?拆开文档发现整套系统就是个精密编排的舞蹈,从毫米波雷达数据处理到油门刹车控制,每个环节都藏着魔鬼细节。
先说目标识别模块,这里用卡尔曼滤波预测前车轨迹的代码写得是真讲究。他们处理毫米波雷达原始数据时,不是简单做个坐标转换就完事了,还加了运动补偿:
// 运动补偿核心代码片段
void MotionCompensation(TargetInfo* target, VehicleDynamic ego_dynamic) {
float delta_yaw = ego_dynamic.yaw_rate * SENSOR_UPDATE_TIME;
Matrix3d rot_mat = CreateRotationMatrix(delta_yaw);
target->position = rot_mat * target->position;
target->velocity -= ego_dynamic.velocity;
}这段看着简单,实际量产要考虑传感器延迟补偿。比如车辆转弯时yaw_rate导致雷达坐标系偏移,必须用旋转矩阵修正目标位置,不然前车位置会飘。博世工程师在这里用了四元数转旋转矩阵的优化算法,文档里藏着句"在ESP32芯片上运算时间控制在80μs以内",这性能优化够狠。
纵向控制模块用了分层架构,上层决策层生成加速度指令,下层转换成油门/刹车。重点是这个PID控制器加了非线性修正:
float ACC_PID_Controller(float target_acc, float current_speed) {
// 基础PID计算
float error = target_acc - current_acc;
integral += error * DT;
derivative = (error - prev_error) / DT;
// 博世特色:速度相关增益调节
float Kp = LookupTable_Kp(current_speed);
float Ki = LookupTable_Ki(current_speed);
// 抗积分饱和处理
if(fabs(output) > MAX_ACC_LIMIT) {
integral -= error * DT;
}
return Kp*error + Ki*integral + Kd*derivative;
}查文档发现他们用了20多个标定参数,不同速度区间PID参数完全不同。特别是低速跟车时积分项权重会降低,防止堵车时刹车点头。这种细节没开过真车调参的人根本想不到。
自动驾驶 无人驾驶 adas 自适应巡航acc算法说明,一共127页,博世大厂的量产软件说明文档
状态机设计更是个艺术品,18个状态切换看得人头皮发麻。举个极端case处理:前车突然切道时,系统不是立马取消跟车,而是启动3秒的虚拟目标延续:
// 目标消失处理状态机
switch(lost_target_state) {
case TARGET_VISIBLE:
if(!is_target_valid) {
start_fade_timer();
lost_target_state = FADING;
}
break;
case FADING:
if(fade_timer < 3.0f) {
use_virtual_target(); // 使用虚拟目标继续控制
fade_timer += DT;
} else {
switch_to_standby();
}
break;
}这种设计能让车辆在立交桥阴影、隧道出入口等场景保持平顺,比某些新势力车企直接退出控制的做法高明不少。文档里特别标注这个3秒阈值是经过2000次实车测试得出的最优解。
整套系统最让我惊讶的是安全监控层,光看这行代码就懂大厂风控多变态:
void SafetyMonitor() {
if( (driver_brake > 0) && (calculated_brake > 0.3g) ) {
override_control(SAFETY_OVERRIDE);
log_failure(DRIVER_INTERVENTION_CONFLICT);
}
// 每20ms检查一次EPS状态
if( (steering_angle > 30deg) && (acc_active) ) {
trigger_hands_on_warning();
}
}驾驶员踩刹车时如果系统还在大力制动,直接触发权限交接。这种双保险机制在实验室可能觉得多余,但量产时能避免多少法律纠纷。文档里安全监控代码占总行数的23%,比核心算法还多。
看完这127页的最大感触:量产级代码和论文里的算法压根不是同个物种。博世把几十年的车辆动力学理解都融在这些if-else里了,什么机器学习新算法在现有车规级芯片面前都是弟弟。下次用ACC跟车时,想想背后这堆状态机和补偿算法,突然觉得方向盘上的那个小图标在闪闪发光。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 0
0 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)