基于CanFestival协议栈的CANopen程序开发:STM32F407实战
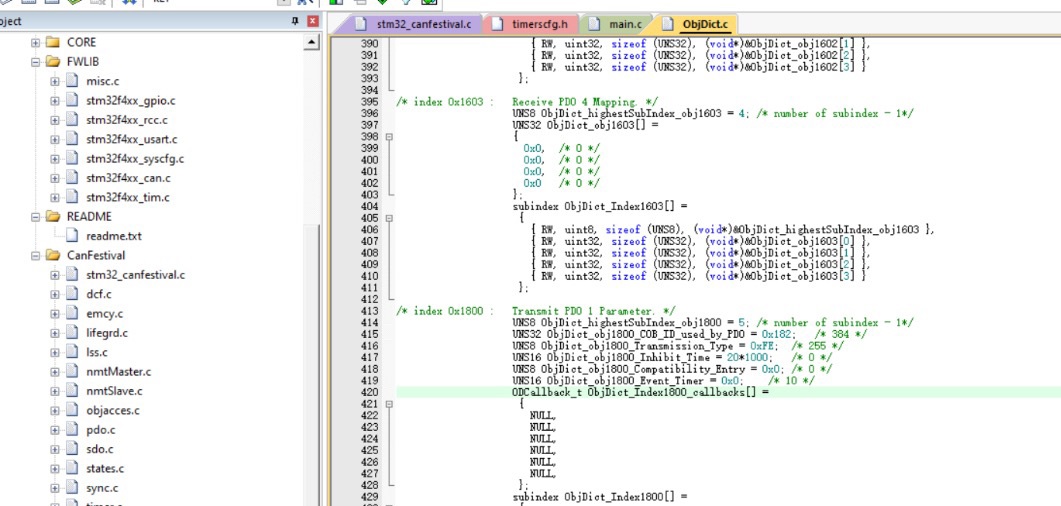
基于canfestival协议栈的canopen程序。包含主从机,主站实现pdo收发、sdo收发、状态管理、心跳,从站实现pdo收发、sdo收发、紧急报文发送,只提供代码,stm32f407常用于一主多从控制、控制伺服电机。在工业控制领域,CANopen协议凭借其高效可靠的通信特性,广泛应用于诸如一主多从控制伺服电机等场景。今天咱就聊聊基于CanFestival协议栈,在STM32F407平台上实
基于canfestival协议栈的canopen程序。 包含主从机,主站实现pdo收发、sdo收发、状态管理、心跳,从站实现pdo收发、sdo收发、紧急报文发送,只提供代码, stm32f407 常用于一主多从控制、控制伺服电机。
在工业控制领域,CANopen协议凭借其高效可靠的通信特性,广泛应用于诸如一主多从控制伺服电机等场景。今天咱就聊聊基于CanFestival协议栈,在STM32F407平台上实现CANopen程序的事儿。
主站功能实现
PDO收发
PDO(Process Data Object)用于周期性或事件驱动的数据传输。在主站代码中,初始化PDO接收映射:
// 假设我们定义了一个PDO接收回调函数
void pdo1_rx_callback(CO_Data *d, UNS8 *m, UNS8 len) {
// 这里可以处理接收到的数据
// m 是接收到的数据数组,len是数据长度
// 例如,简单打印接收到的数据长度
printf("PDO1 received data length: %d\n", len);
}
// 初始化PDO接收
void init_pdo_rx(void) {
CO_RPDO *rpdo = &CO->rPDO[0];
rpdo->nmtState = CO_RPDO_ENABLED;
rpdo->eventTime = 0;
rpdo->index = 0x1400;
rpdo->subIndex = 0x00;
rpdo->mapping = 0;
rpdo->rxEvent = 0;
rpdo->callback = pdo1_rx_callback;
}这段代码里,我们先定义了一个PDO接收回调函数pdo1rxcallback,当有PDO数据接收时,它会被调用。然后在initpdorx函数里,对PDO接收进行初始化设置,指定了PDO的相关参数和回调函数。
基于canfestival协议栈的canopen程序。 包含主从机,主站实现pdo收发、sdo收发、状态管理、心跳,从站实现pdo收发、sdo收发、紧急报文发送,只提供代码, stm32f407 常用于一主多从控制、控制伺服电机。
PDO发送就相对简单些,假设我们要发送一个简单的整数:
// 发送PDO数据
void send_pdo_data(void) {
CO_TPDO *tpdo = &CO->tPDO[0];
UNS8 data[4];
int value = 1234;
// 将整数转换为字节数组用于发送
data[0] = (value >> 24) & 0xFF;
data[1] = (value >> 16) & 0xFF;
data[2] = (value >> 8) & 0xFF;
data[3] = value & 0xFF;
co_sendTPDO(tpdo, data, 4);
}这里构造了一个整数数据,转换为字节数组后,通过co_sendTPDO函数发送出去。
SDO收发
SDO(Service Data Object)用于非周期性的数据访问。主站读取从站SDO数据示例:
// 读取从站SDO数据回调
void sdo_read_callback(CO_SDO *sdo, UNS8 errCode) {
if (errCode == 0) {
// 读取成功,处理数据
UNS8 *data = sdo->sdoRxData;
// 假设数据长度为4字节
int value = (data[0] << 24) | (data[1] << 16) | (data[2] << 8) | data[3];
printf("SDO read success, value: %d\n", value);
} else {
printf("SDO read error, error code: %d\n", errCode);
}
}
// 发起SDO读取请求
void read_sdo(void) {
CO_SDO *sdo = &CO->SDO[0];
sdo->sdoTxData[0] = 0x10; // 假设索引
sdo->sdoTxData[1] = 0x00; // 假设子索引
co_SDOclientRead(sdo, sdo_read_callback);
}先定义了读取回调函数 sdoreadcallback,在读取完成后,根据错误码处理结果。read_sdo函数则发起了SDO读取请求,指定要读取的索引和子索引。
状态管理与心跳
主站管理从站状态并接收心跳报文。设置心跳消费者回调:
// 心跳消费者回调
void heartbeat_consumer_callback(CO_NMT *nmt, UNS8 nodeId, UNS8 state) {
printf("Node %d entered state %d\n", nodeId, state);
}
// 初始化心跳消费者
void init_heartbeat_consumer(void) {
CO_NMT *nmt = &CO->NMT;
nmt->heartbeatConsumer = heartbeat_consumer_callback;
}这里定义了心跳消费者回调函数heartbeatconsumercallback,当从站状态改变时,会打印出节点ID和新状态。initheartbeatconsumer函数用于初始化心跳消费者。
从站功能实现
PDO收发
从站PDO接收与主站类似,只是初始化设置稍有不同。假设我们有一个不同的PDO接收回调:
// 从站PDO接收回调
void slave_pdo1_rx_callback(CO_Data *d, UNS8 *m, UNS8 len) {
// 处理从站接收到的PDO数据
// 例如,简单打印接收到的数据
printf("Slave PDO1 received data: ");
for (int i = 0; i < len; i++) {
printf("%02X ", m[i]);
}
printf("\n");
}
// 从站初始化PDO接收
void slave_init_pdo_rx(void) {
CO_RPDO *rpdo = &CO->rPDO[0];
rpdo->nmtState = CO_RPDO_ENABLED;
rpdo->eventTime = 0;
rpdo->index = 0x1400;
rpdo->subIndex = 0x00;
rpdo->mapping = 0;
rpdo->rxEvent = 0;
rpdo->callback = slave_pdo1_rx_callback;
}这里的slavepdo1rxcallback专门处理从站接收到的PDO数据,slaveinitpdorx函数初始化从站PDO接收。
SDO收发
从站处理SDO请求,比如写SDO请求处理:
// 从站SDO写请求处理
UNS8 slave_sdo_write_handler(CO_SDO *sdo, UNS8 dataType, UNS8 dataSize, UNS8 *data) {
// 这里可以根据索引和子索引处理写数据请求
// 例如,简单返回成功
return 0;
}
// 初始化从站SDO
void slave_init_sdo(void) {
CO_SDO *sdo = &CO->SDO[0];
sdo->sdoWriteHandler = slave_sdo_write_handler;
}slavesdowritehandler函数处理从站接收到的SDO写请求,slaveinit_sdo函数初始化从站SDO相关设置。
紧急报文发送
从站发送紧急报文,比如在某个异常情况下:
// 从站发送紧急报文
void slave_send_emcy(void) {
CO_EMCY *emcy = &CO->EMCY;
UNS16 errCode = 0x1234; // 假设错误码
UNS8 errRegister = 0x01; // 假设错误寄存器值
co_sendEMCY(emcy, errCode, errRegister);
}slavesendemcy函数通过co_sendEMCY函数发送紧急报文,携带错误码和错误寄存器值。
以上就是基于CanFestival协议栈在STM32F407上实现CANopen主从站主要功能的代码及简要分析,实际应用中还需要根据具体需求进行调整和完善。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)