51汇编语言学习9:DS18B20温度读取
51单片机汇编语言学习记录
·
$MOD51
ORG 0000H ;程序起始地址
LJMP MAIN
ORG 000BH ;T0中断入口
LJMP INT_T0
;------------------------------------------------------------------------
ORG 1000H
MAIN:
MOV TMOD,#21H ;设置定时/计数器T1位方式2,8位自动重装模式。定时/计数器T0位方式1,16位定时/计数器模式
MOV PCON,#00H ;SMOD=0
MOV TH1,#0FDH ;设定波特率为9600
MOV TL1,#0FDH
MOV SCON,#50H ;设置串口为8位模式,无校验
MOV IE,#82H ;允许全局中断、T0中断
MOV IP,#00H ;所有中断优先级为0
SETB TR1 ;使能T1
SETB F0 ;F0作为定时/计数器T0中断退出标志位(0表示退出中断)
SETB P3.7 ;使总线高电平
MLOOP:
LCALL INIT
LCALL SKIP_ROM
LCALL CONVERT_T
LCALL DELAY_750ms
LCALL INIT
LCALL SKIP_ROM
LCALL READ_PAD
LCALL READ_BYTE
MOV SBUF,A
LCALL READ_BYTE
MOV SBUF,A
LCALL DELAY_750ms
JMP MLOOP
RET
;------------------------------------------------------------------------
;#DS18B20的复位函数
;------------------------------------------------------------------------
RESET:
CLR P3.7 ;使总线低电平
MOV B,#48
LCALL DELAY
SETB P3.7 ;释放总线电平,接收应答信号
RET
;------------------------------------------------------------------------
;#DS18B20的初始化函数
;------------------------------------------------------------------------
INIT:
LCALL RESET
ILOOP1:
JB P3.7,ILOOP1 ;等待总线被从机拉低
ILOOP2:
JNB P3.7,ILOOP2 ;等待总线被从机拉高
MOV B,#48
LCALL DELAY
RET
;------------------------------------------------------------------------
;#写1时序
;------------------------------------------------------------------------
WRITE1:
CLR P3.7 ;使总线低电平
NOP
NOP
SETB P3.7 ;使总线高电平
MOV B,#6
LCALL DELAY
RET
;------------------------------------------------------------------------
;#写0时序
;------------------------------------------------------------------------
WRITE0:
CLR P3.7 ;使总线低电平
MOV B,#6
LCALL DELAY
SETB P3.7 ;释放总线
RET
;------------------------------------------------------------------------
;#写1字节
;------------------------------------------------------------------------
WRITE_BYTE:
MOV R2,#8
LAB:
RRC A
JC CALL_WRITE1
LCALL WRITE0
JMP LAB1
CALL_WRITE1:
LCALL WRITE1
LAB1:
DJNZ R2,LAB
RET
;------------------------------------------------------------------------
;#读1位时序
;------------------------------------------------------------------------
READ_BIT:
CLR P3.7 ;拉低总线
NOP ;延时2us
NOP
SETB P3.7 ;释放总线
NOP
NOP
MOV C,P3.7 ;读取总线数据,存放在C中
MOV B,#6
LCALL DELAY
RET
;------------------------------------------------------------------------
;#读取1字节信息
;------------------------------------------------------------------------
READ_BYTE:
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
LCALL READ_BIT
RRC A
RET
;------------------------------------------------------------------------
;#Read Rom命令:33H(0011 0011B)
;------------------------------------------------------------------------
READ_ROM:
LCALL WRITE1
LCALL WRITE1
LCALL WRITE0
LCALL WRITE0
LCALL WRITE1
LCALL WRITE1
LCALL WRITE0
LCALL WRITE0
RET
;------------------------------------------------------------------------
;#Skip Rom命令:CCH(1100 1100B)
;------------------------------------------------------------------------
SKIP_ROM:
LCALL WRITE0
LCALL WRITE0
LCALL WRITE1
LCALL WRITE1
LCALL WRITE0
LCALL WRITE0
LCALL WRITE1
LCALL WRITE1
RET
;------------------------------------------------------------------------
;#Read SCratchpad命令:BEH(1011 1110B)
;------------------------------------------------------------------------
READ_PAD:
LCALL WRITE0
LCALL WRITE1
LCALL WRITE1
LCALL WRITE1
LCALL WRITE1
LCALL WRITE1
LCALL WRITE0
LCALL WRITE1
RET
;------------------------------------------------------------------------
;#CONVERT命令:44H(0100 0100B)
;------------------------------------------------------------------------
CONVERT_T:
LCALL WRITE0
LCALL WRITE0
LCALL WRITE1
LCALL WRITE0
LCALL WRITE0
LCALL WRITE0
LCALL WRITE1
LCALL WRITE0
RET
;------------------------------------------------------------------------
;延时函数X10us
;------------------------------------------------------------------------
DELAY:
MOV R1,B
LP:
MOV R0,#10
LP1:
DJNZ R0,LP1
DJNZ R1,LP
RET
;------------------------------------------------------------------------
;延时函数750ms
;------------------------------------------------------------------------
DELAY_750ms:
MOV R0,#75
DLOOP2:
MOV TH0,#0D8H ;计时10ms
MOV TL0,#0F0H
SETB TR0 ;使能T0
DLOOP3:
JB F0,DLOOP3 ;F0为1则一直循环
SETB F0
DJNZ R0,DLOOP2
RET
;------------------------------------------------------------------------
;#T0中断处理函数,主要功能清除中断标志、停止计数、
;------------------------------------------------------------------------
INT_T0:
CLR TR0 ;停止定时/计数器T0的计数
CLR TF0 ;清除定时/计数器T0的溢出标志
CLR F0
RETI
;------------------------------------------------------------------------
END
原理图: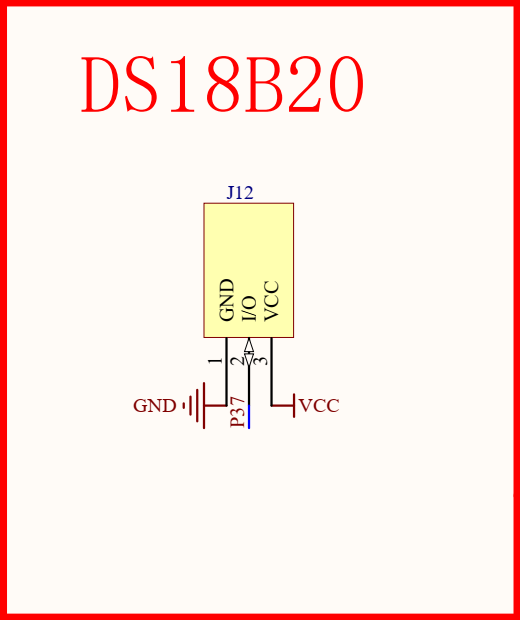

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)