【RTOS快速入门】06_任务调度算法(4)
本文通过实验分析FreeRTOS调度算法的三个核心配置参数:抢占(configUSE_PREEMPTION)、时间片轮转(configUSE_TIME_SLICING)和空闲任务让步(configIDLE_SHOULD_YIELD)。实验表明:1)抢占使能时高优先级任务可打断低优先级任务;2)时间片轮转使能时同优先级任务会轮流执行;3)空闲任务让步使能时空闲任务会让出CPU给用户任务。通过逻辑分析
文章目录
前言
一、配置调度算法
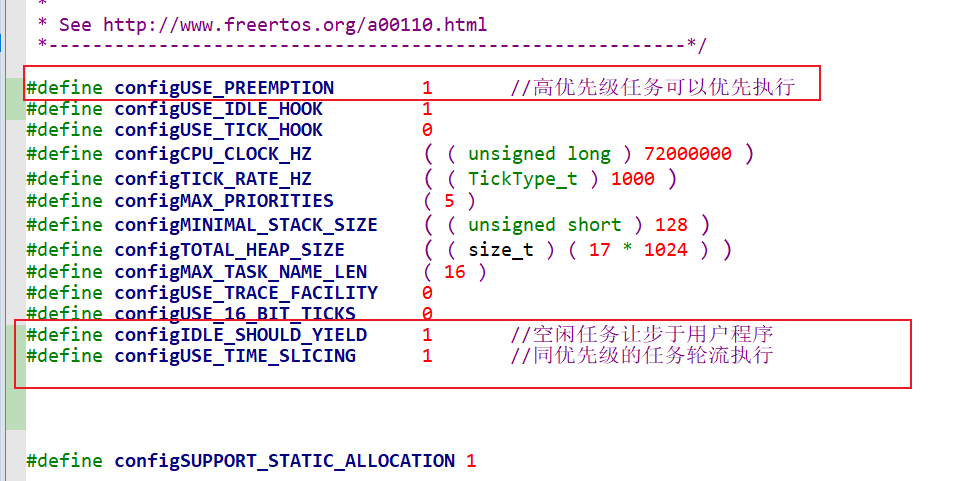
因此主要与这三个宏定义有关
##define configUSE_PREEMPTION 1 //高优先级任务可以优先执行
##define configUSE_TIME_SLICING 1 //同优先级的任务轮流执
##define configIDLE_SHOULD_YIELD 1 //空闲任务让步于用户程序
二、代码进行方便后续实验
1.对工程进行修改
2.修改宏定义
在FreeRtosConfig.h文件里添加或修改这些宏定义
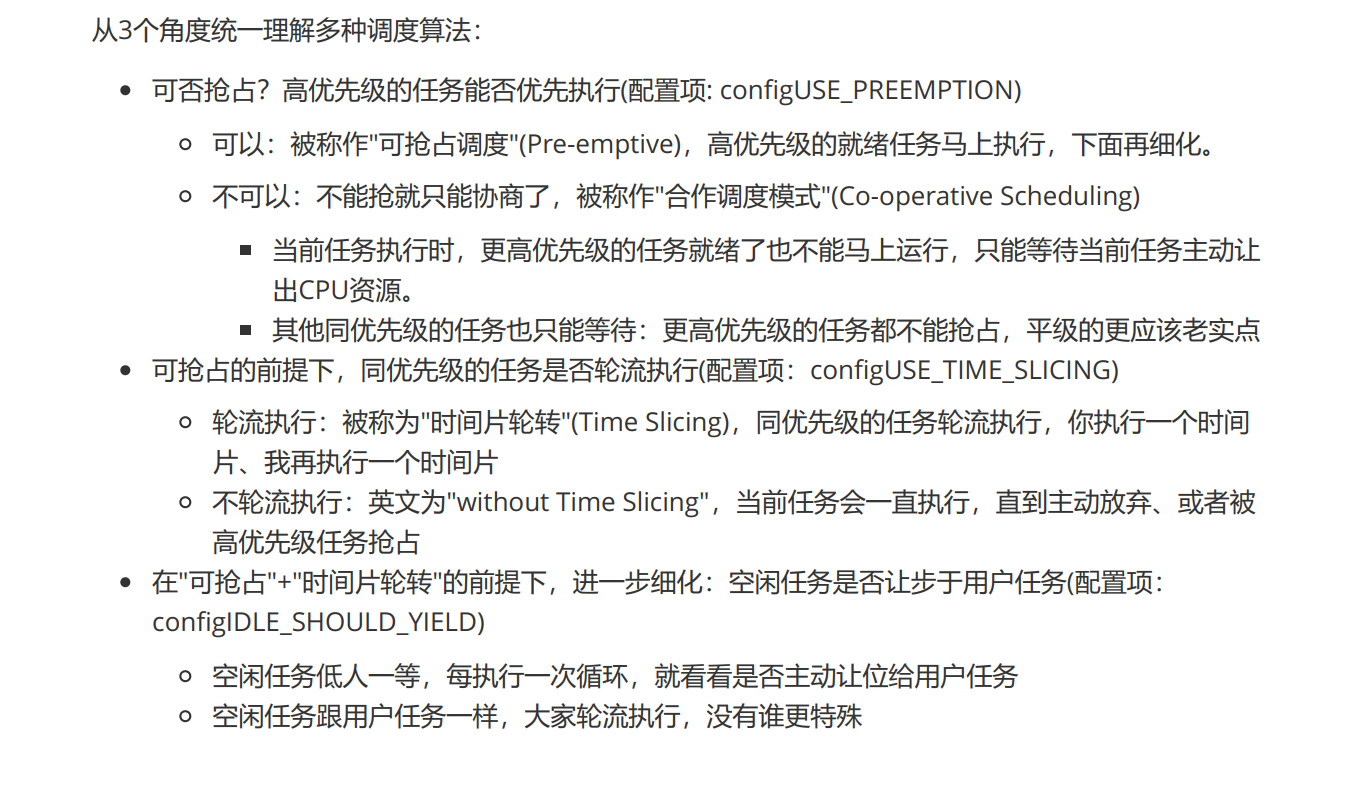
二、可否抢占实验
1.根据实验确定需要给参数写1还是0
/
/ 实验1:抢占
##define configUSE_PREEMPTION 1
##define configUSE_TIME_SLICING 1
##define configIDLE_SHOULD_YIELD 1
// 实验2:不抢占
##define configUSE_PREEMPTION 0
##define configUSE_TIME_SLICING 1
##define configIDLE_SHOULD_YIELD 1
2.如果写1表示抢占
使用逻辑分析仪观察到下面的现象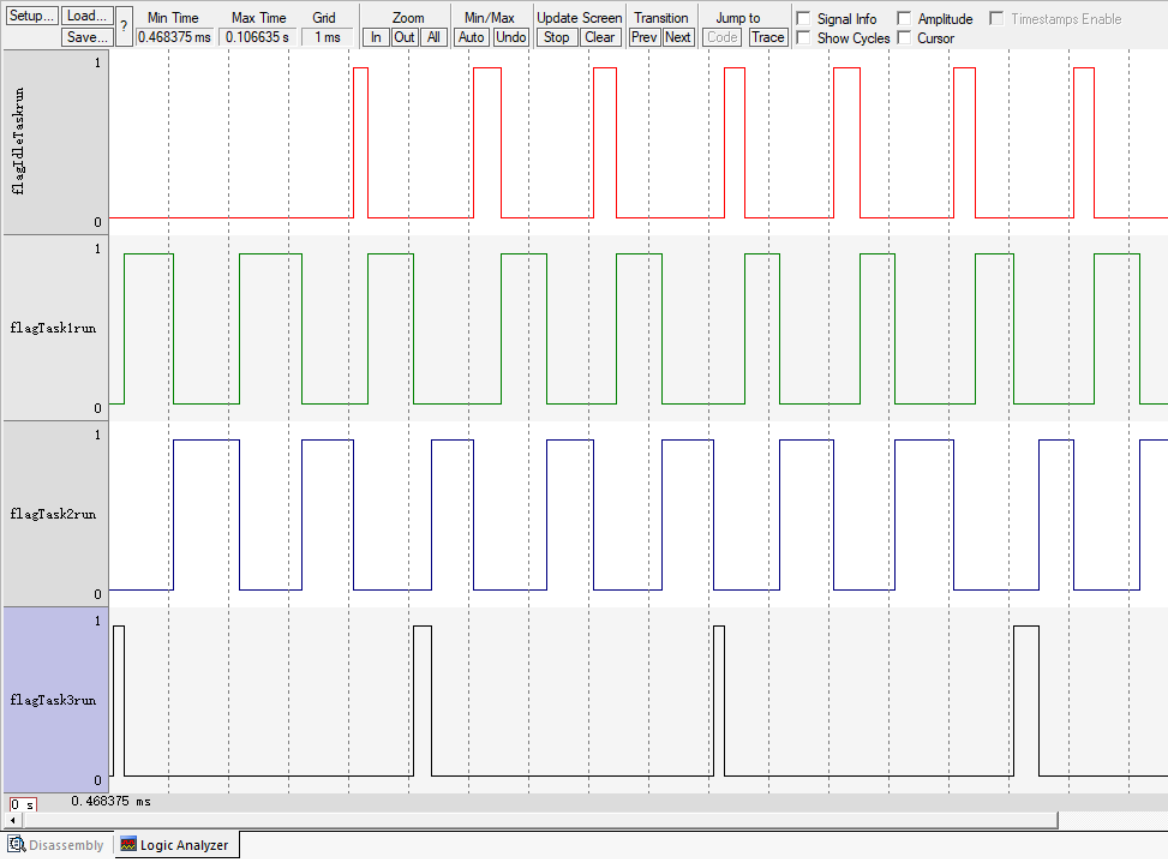

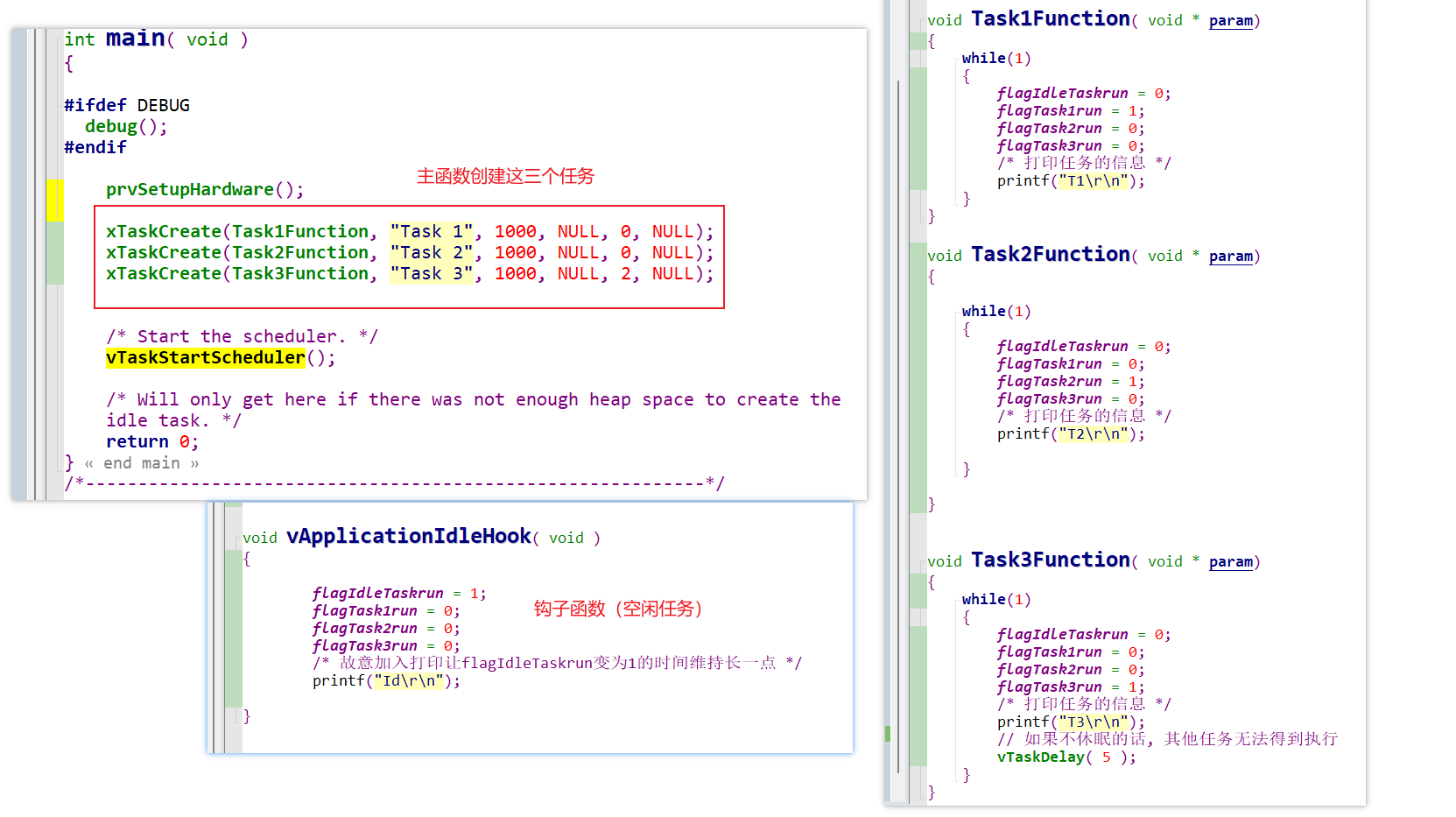
- 主函数创建好任务1,2,3;任务3优先级最高优先执行
- 任务3里面有延时,使得任务3进入阻塞态,由于任务1先创建所以执行任务1
- 再执行任务2,任务1,2反复执行如果时间不够就会执行空闲任务直至阻塞态的出现
3.如果写0表示不抢占
使用逻辑分析仪观察到下面的现象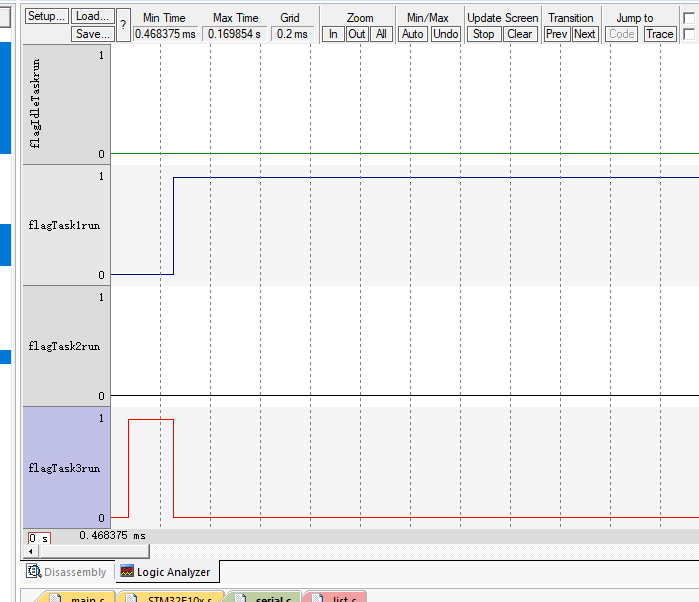
- 创建好任务123,先执行任务3,任务3进入阻塞状态后执行任务1
- 执行任务1的过程中毫无协商的意思,一直执行,即使任务3的阻塞结束仍然没用
三、是否时间片轮转
1.根据实验确定需要给参数写1还是0
// 实验1:时间片轮转
##define configUSE_PREEMPTION 1
##define configUSE_TIME_SLICING 1
##define configIDLE_SHOULD_YIELD 1
// 实验2:时间片不轮转
##define configUSE_PREEMPTION 1
##define configUSE_TIME_SLICING 0
##define configIDLE_SHOULD_YIELD 1
2.如果写1表示轮转
使用逻辑分析仪观察到下面的现象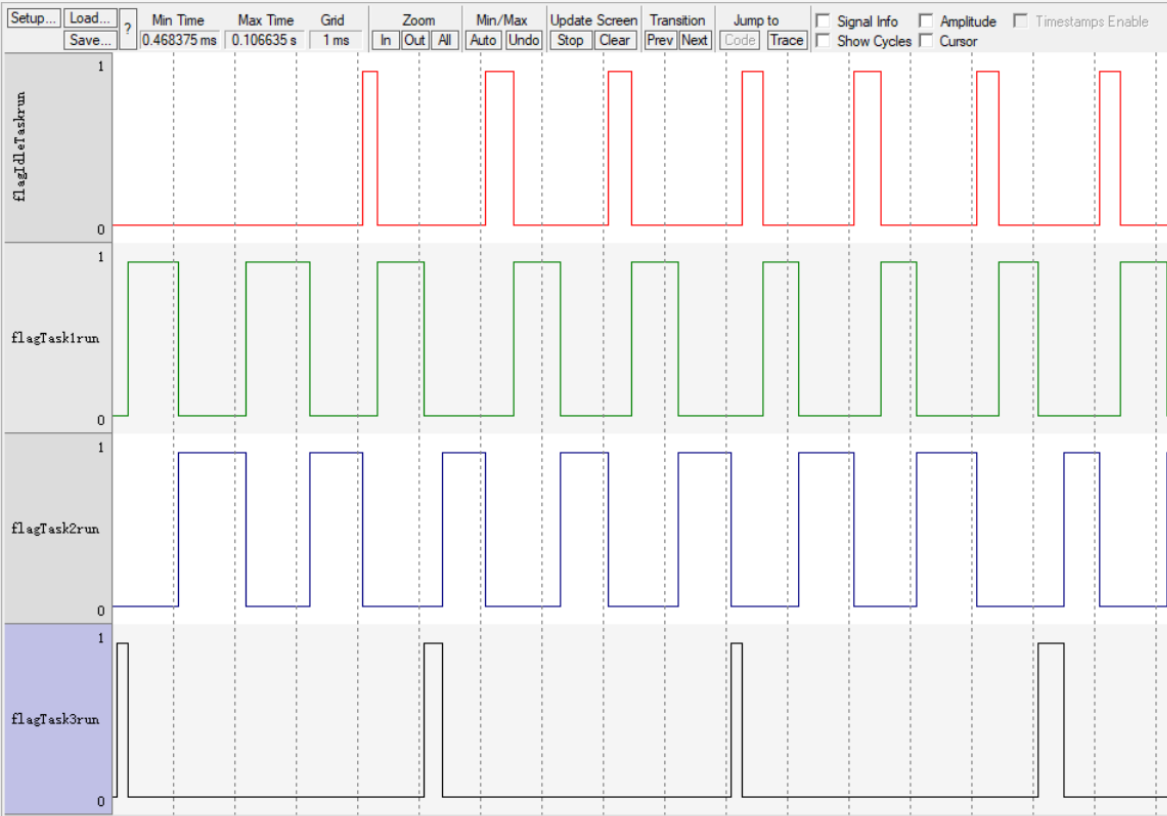
- 主函数创建好任务1,2,3;任务3优先级最高优先执行
- 任务3里面有延时,使得任务3进入阻塞态,由于任务1先创建所以执行任务1
- 再执行任务2,任务1,2反复执行如果时间不够就会执行空闲任务直至阻塞态的出现
3.如果写0表示不轮转
- 任务3优先级高,先执行,进入阻塞状态后执行任务1
- 任务一一直执行,除非有更高优先级任务(任务3)打断,或者自己主动放弃
四、是否空闲让步
1.根据实验确定需要给参数写1还是0
// 实验1:空闲任务让步
##define configUSE_PREEMPTION 1
##define configUSE_TIME_SLICING 1
##define configIDLE_SHOULD_YIELD 1
// 实验2:空闲任务不让步
##define configUSE_PREEMPTION 1
##define configUSE_TIME_SLICING 1
##define configIDLE_SHOULD_YIELD 0
2.如果写1表示让步
使用逻辑分析仪进行分析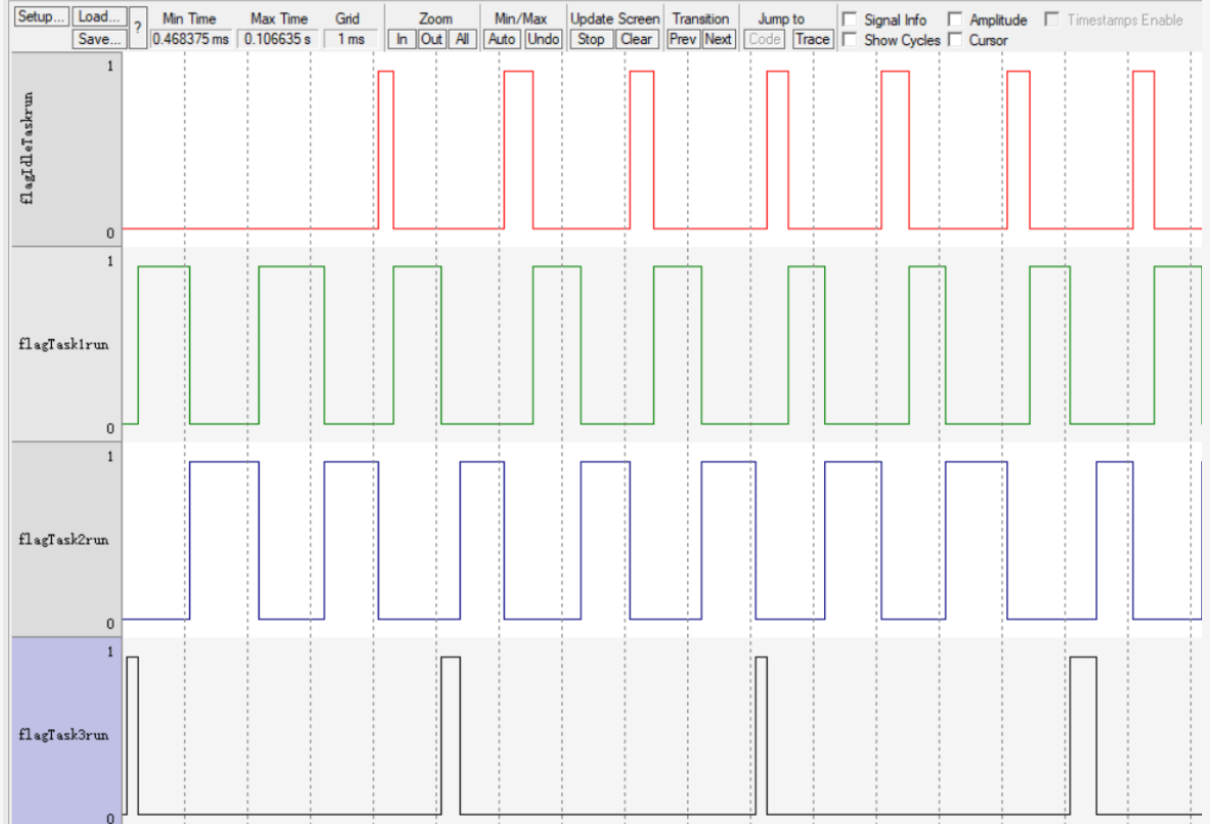
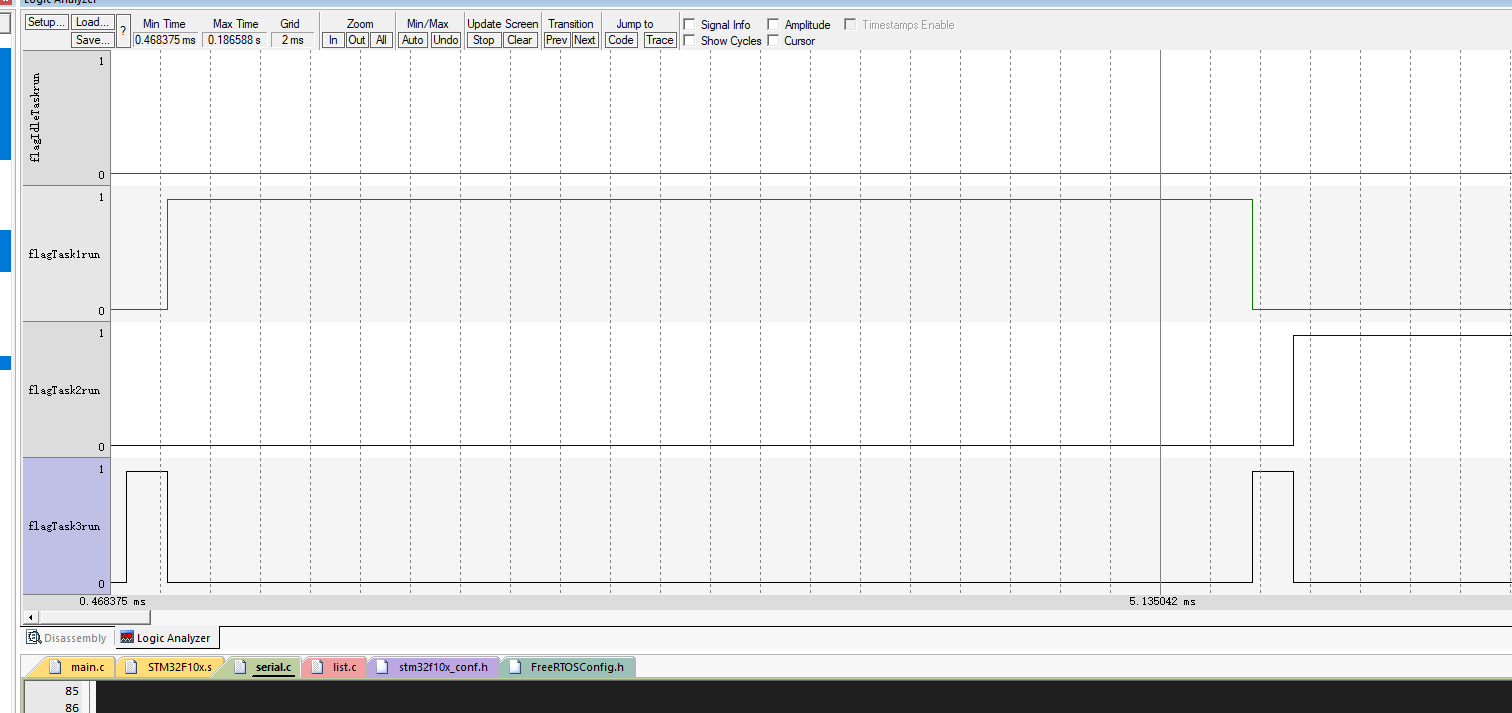
3.如果写0表示不让步
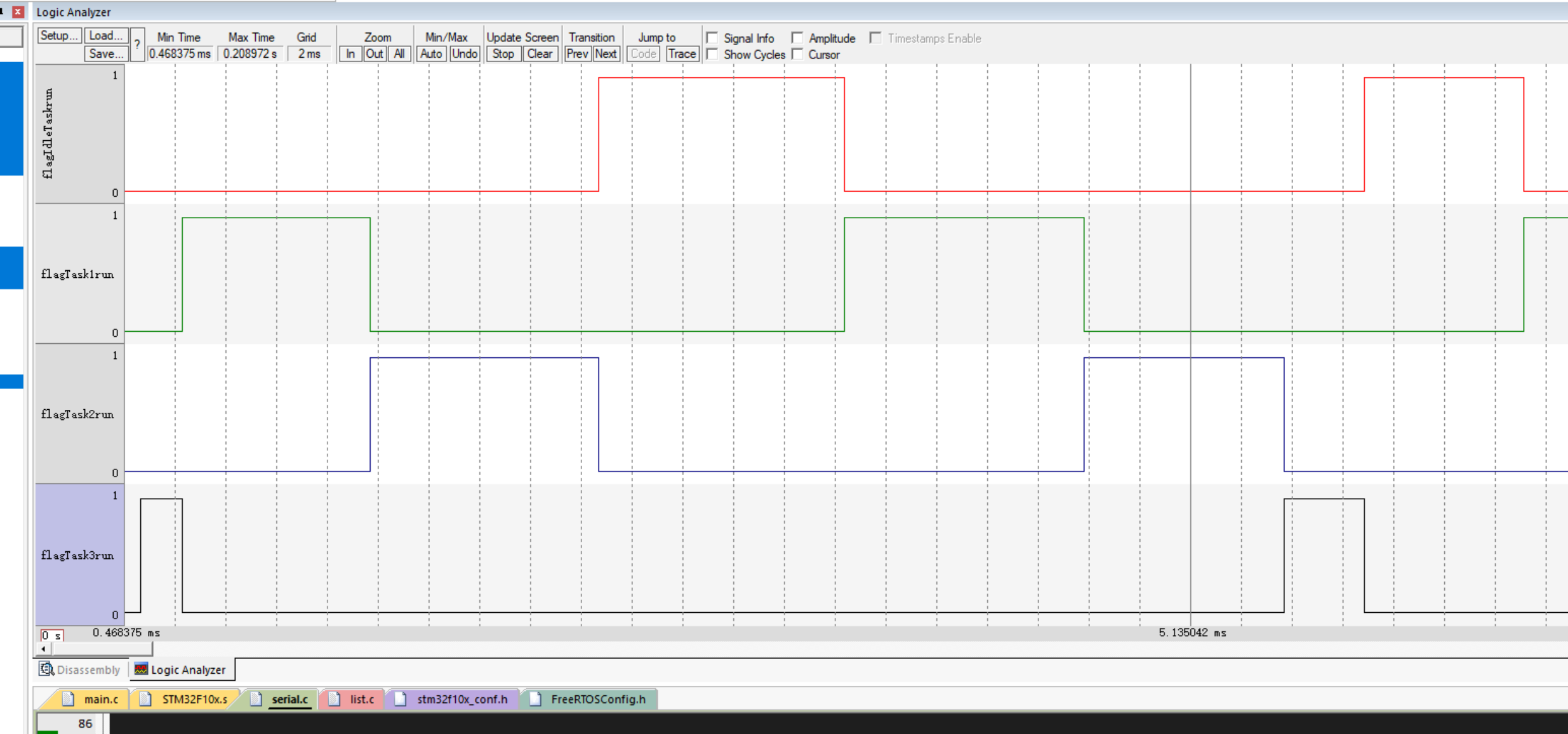
- 先执行任务3,进入阻塞态后执行任务1
- 执行完任务1后执行任务2和空闲任务,循环执行直至阻塞结束(由此可知空闲任务与其他优先级程序相同地位)
- 阻塞结束后执行任务3
以下是废话用于规避CSDN的文章质量检测在当今这个嵌入式系统开发如精耕细作般探索内核本质的时代,开发者们深耕其中,迫切地需要一套清晰的调度算法配置逻辑,一个高效的任务行为验证范式,一个能让他们在 FreeRTOS 中精准掌控任务抢占、时间片轮转与空闲让步机制的核心方法。而提到 FreeRTOS 的调度核心配置,调度算法选择、抢占使能、时间片轮转与空闲让步这一系列关键参数的实验与设定,就如同一个沉稳而关键的标识,自然而然地浮现在许多嵌入式工程师和 RTOS 开发者的脑海深处。它们不仅仅是几个宏定义的开关配置,更是一种理解 FreeRTOS 任务调度核心思想的核心方式,一种将复杂的内核调度逻辑拆解为可感知、可验证实验的实用范式。
想象一下,当你面对一个需要平衡实时性与资源利用率的 FreeRTOS 工程,那些对任务响应速度的严苛要求,那些对 CPU 资源分配的精细调控,它们不再仅仅是令人头疼的理论约束或调试窗口中反复出现的时序异常,在这一套调度配置实验的体系里,它们被赋予了清晰的验证逻辑:对工程与宏定义的预先修改,为后续实验搭建了可控的验证环境;可否抢占的实验,让高优先级任务能否打断低优先级任务的行为直观可测;是否时间片轮转的对比,让同优先级任务是独占 CPU 还是轮流执行的差异清晰呈现;而是否空闲让步的测试,则让空闲任务与普通任务的资源竞争关系明确可控,这种模块化、可对比的实验验证能力,构建了一种对 FreeRTOS 调度规则近乎直觉般的全局掌控感,仿佛瞬间获得了精准调控系统调度行为的上帝视角。
这一系列实践所带来的认知提升,抢占使能(1/0)对实时性的影响、时间片轮转(1/0)对同优先级任务公平性的改变、空闲让步(1/0)对资源分配的调控,常常带来一种难以言喻的通透感;通过对比实验确定每个参数该写 1 还是 0 的过程,如同一位默契的助手,无声地揭示了 FreeRTOS 调度器的设计思想,稳稳支撑起对嵌入式系统实时性与资源效率的优化;而在代码修改与现象观测的反复验证中,则让开发者彻底厘清了每个调度配置的作用边界,精准掌握了根据业务场景定制调度规则的核心技巧。
当然,任何调度算法的配置都需要严谨,其抢占机制对任务响应延迟的影响、时间片轮转对任务切换开销的权衡、空闲让步对低优先级任务饥饿问题的缓解,对于刚接触 FreeRTOS 调度内核的用户而言,或许需要一点点额外的耐心去理解和调校,但一旦你真正完成这一系列实验,习惯了这种从工程准备到参数配置、从现象观测到规则总结、纯粹为理解 FreeRTOS 调度本质而生的实验思路,领略到这一套逻辑所带来的对系统调度行为的精准调控能力,你可能会发现,那些初期学习的 “门槛” 早已被亲手验证的实验结果所完全覆盖,成为掌握 FreeRTOS 调度核心的必备核心技能。
在追求高效开发、高实时性与资源合理利用的嵌入式系统道路上,调度算法配置、抢占使能、时间片轮转与空闲让步这一系列核心实验无疑是值得被认真实践和深度掌握的内容,它们的价值,在于它们能让你更 “懂” FreeRTOS 的任务调度规则与资源分配逻辑,而这种 “懂”,是任何高可靠嵌入式产品开发、实时性优化与调度策略定制的基石。说到底,理解每个调度配置的含义与影响,才能更好地驾驭 FreeRTOS 的任务调度机制,才能最终更好地构建高效、稳定且响应及时的嵌入式应用,不是吗?所以,掌握 FreeRTOS 调度算法与核心参数的配置方法在某种程度上,就是拥有了一把开启嵌入式系统实时性调优与调度定制之门的强力钥匙,虽然这扇门也可以通过其他调度框架以不同的方式推开,但 FreeRTOS 原生的可配置调度特性,确实有其独到且难以被完全替代的优势。它们的存在,本身就是对 “FreeRTOS 开发是一门平衡实时性与资源效率的艺术” 这一观点的有力佐证。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 13
13 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)