ESP32S3机器人实训实战:LVGL9.4移植+GUI Guider可视化界面开发全流程
本文围绕 ESP32S3 机器人实训,基于 ESP-IDF 开发框架,完整阐述 LVGL9.4 图形库向 ESP32S3 的底层移植、GUI Guider 可视化界面开发及机器人场景功能落地全流程。内容涵盖开发环境与硬件准备、LVGL 标准化移植步骤、GUI Guider 安装与界面设计、代码移植落地、机器人场景实战及高频问题排查与优化。教程结合实训经验,所有代码与配置可直接复用到各类机器人实训项
前言
在机器人设计与应用综合实训、嵌入式智能设备开发中,人机交互界面是设备与用户对话的核心窗口。ESP32S3凭借其双核高性能、丰富外设接口与无线通信能力,已成为高校机器人实训、中小型嵌入式项目的首选主控;而LVGL(Light and Versatile Graphics Library)作为开源轻量级嵌入式图形库,以极低的资源占用、丰富的控件生态和完善的跨平台适配,完美匹配ESP32的硬件能力,成为嵌入式GUI开发的标杆方案。
本文基于ESP-IDF开发框架,结合一线实训教学中的实操笔记与工程化经验,完整拆解LVGL9.4到ESP32S3的底层移植、GUI Guider可视化界面开发、机器人场景功能落地全流程,同时汇总实训中高频踩坑点与优化方案,所有代码与配置均可直接复用到智能避障小车、巡检机器人、机械臂控制等实训项目中,既是高校嵌入式GUI教学的标准化教程,也是工程师快速落地LVGL项目的实战指南。
一、开发环境与硬件准备
1.1 硬件清单(机器人实训标配)
|
硬件名称 |
规格参数 |
核心用途 |
|
ESP32S3开发板 |
双核Xtensa LX7,内置WiFi/蓝牙,PSRAM可选 |
主控核心,运行LVGL与机器人控制逻辑 |
|
LCD显示屏+FT5x06触摸屏 |
分辨率推荐480320/800480,16bit色彩深度,I2C触摸接口 |
人机交互界面显示与触摸输入 |
|
USB数据线 |
Type-C,支持数据传输与供电 |
程序烧录、串口调试与供电 |
|
配套外设 |
3.7V锂电池、HC-SR04超声波模块、直流电机驱动、ADC电压采集电路 |
机器人功能拓展,实现传感器数据可视化 |
1.2 软件环境与核心组件
- 开发环境:VSCode + ESP-IDF v5.0+ 开发框架
- 可视化工具:GUI Guider v1.10.0+(LVGL官方UI设计工具)
- 运行依赖:JDK1.8+(GUI Guider运行必备)
- 核心组件(ESP-IDF组件管理器直接拉取):
- lvgl/lvgl: ^9.4.0:LVGL核心图形库
- espressif/esp_lvgl_port: ^2.6.3:ESP32与LVGL的接口适配层
- espressif/esp_lcd_touch_ft5x06: ^1.0.6:FT5x06系列触摸屏驱动
- 78/xiaozhi-fonts: ^1.5.3:开源中文字体组件,解决中文显示问题
二、核心基础:LVGL9.4到ESP32S3的标准化移植
LVGL的底层移植是界面开发的核心,本章节严格遵循工程化开发流程,分为5个标准化步骤,适配ESP-IDF框架,也是机器人实训中嵌入式GUI开发的必学流程。
2.1 第一步:基础工程准备
- 打开已验证的ESP32S3基础工程,确保工程中LCD底层驱动、I2C通信、串口功能可正常运行,避免后续移植中硬件底层问题干扰调试;
- 清理工程中冗余的测试代码,保留main.c核心入口、LCD驱动文件(LCD.c/LCD.h)、CMake编译配置文件,为LVGL移植预留干净的工程环境。
2.2 第二步:LVGL组件拉取
提供两种组件拉取方式,批量开发推荐直接修改配置文件,单项目调试可使用终端指令,二者二选一即可。
方式1:配置文件批量添加(推荐)
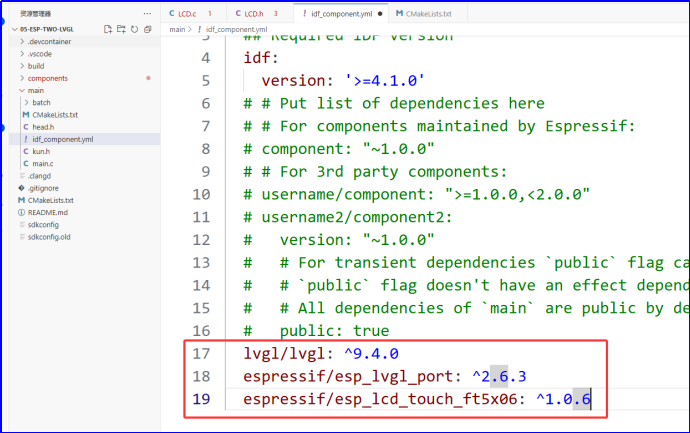
在工程main/idf_component.yml文件中添加以下依赖,保存后ESP-IDF会自动拉取对应版本组件:
|
YAML dependencies: lvgl/lvgl: ^9.4.0 espressif/esp_lvgl_port: ^2.6.3 espressif/esp_lcd_touch_ft5x06: ^1.0.6 |
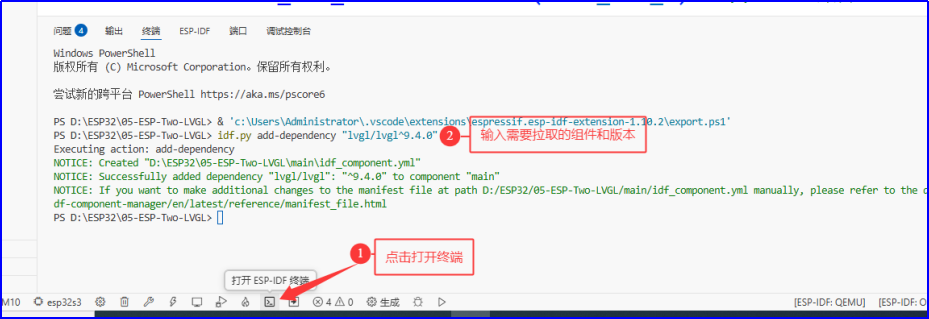
方式2:ESP-IDF终端指令添加
打开VSCode下方ESP-IDF终端,依次执行以下指令,完成组件拉取:
|
Bash idf.py add-dependency "lvgl/lvgl^9.4.0" idf.py add-dependency "espressif/esp_lvgl_port^2.6.3" idf.py add-dependency "espressif/esp_lcd_touch_ft5x06^1.0.6" |
2.3 第三步:LVGL核心适配代码编写
此步骤是移植的核心,需完成液晶屏、触摸屏与LVGL的接口绑定,所有代码均适配ESP32S3硬件,可直接复用。
1. 全局句柄与宏定义
在LCD.c文件顶部,添加全局句柄定义与绘制缓存宏定义,用于LVGL绑定显示与输入设备:
|
C #include "esp_lcd_touch_ft5x06.h" #include "esp_lvgl_port.h" // 触摸屏句柄 static esp_lcd_touch_handle_t tp; // LVGL显示设备句柄(指向液晶屏) static lv_disp_t *disp; // LVGL输入设备句柄(指向触摸屏) static lv_indev_t *disp_indev = NULL; // LVGL绘制缓存高度,平衡内存占用与界面流畅度,推荐20-50 #define BSP_LCD_DRAW_BUF_HEIGHT (20) // 液晶屏水平/垂直分辨率,需与实际屏幕参数匹配 #define BSP_LCD_H_RES 480 #define BSP_LCD_V_RES 320 // I2C总线编号,需与底层驱动一致 #define BSP_I2C_NUM 0 |
2. 液晶屏初始化+LVGL接口绑定
实现bsp_display_lcd_init函数,完成液晶屏底层初始化,并将其注册到LVGL图形库中,重点注意:旋转配置必须与液晶屏底层驱动完全一致,DMA与SPIRAM不可同时开启:
|
// 液晶屏初始化+添加LVGL接口 static lv_disp_t *bsp_display_lcd_init(void) { /* 液晶屏底层初始化,需复用工程中已验证的LCD驱动 */ bsp_display_new(); lcd_set_color(0xffff); // 整屏背景置白,验证屏幕是否正常点亮 esp_lcd_panel_disp_on_off(panel_handle, true); // 开启屏幕显示 /* 配置LVGL显示参数,绑定液晶屏接口 */ const lvgl_port_display_cfg_t disp_cfg = { .io_handle = io_handle, .panel_handle = panel_handle, .buffer_size = BSP_LCD_H_RES * BSP_LCD_DRAW_BUF_HEIGHT, .double_buffer = false, // 双缓存可提升流畅度,需根据硬件内存开启 .hres = BSP_LCD_H_RES, .vres = BSP_LCD_V_RES, .monochrome = false, /* 旋转/镜像配置,必须与液晶屏底层驱动参数完全一致 */ .rotation = { .swap_xy = true, .mirror_x = true, .mirror_y = false, }, .flags = { .buff_dma = true, // 开启DMA加速,提升绘制速度 .buff_spiram = false, // 与DMA互斥,不可同时为true .swap_bytes = true, } }; return lvgl_port_add_disp(&disp_cfg); } |
3. 触摸屏初始化+LVGL接口绑定
实现bsp_touch_new与bsp_display_indev_init函数,完成FT5x06触摸屏驱动初始化,并将触摸输入注册到LVGL中,解决触摸坐标偏移问题:
|
// FT5x06触摸屏底层初始化 esp_err_t bsp_touch_new(esp_lcd_touch_handle_t *ret_touch) { esp_lcd_touch_config_t tp_cfg = { .x_max = BSP_LCD_V_RES, .y_max = BSP_LCD_H_RES, .rst_gpio_num = GPIO_NUM_NC, // 与LCD复位引脚共用 .int_gpio_num = GPIO_NUM_NC, .levels = { .reset = 0, .interrupt = 0, }, /* 触摸坐标配置,必须与液晶屏旋转配置一致,避免触摸偏移 */ .flags = { .swap_xy = 1, .mirror_x = 1, .mirror_y = 0, }, }; esp_lcd_panel_io_handle_t tp_io_handle = NULL; // 适配FT5x06的I2C配置 esp_lcd_panel_io_i2c_config_t tp_io_config = ESP_LCD_TOUCH_IO_I2C_FT5X06_CONFIG(); // 初始化I2C通信接口 ESP_RETURN_ON_ERROR(esp_lcd_new_panel_io_i2c((esp_lcd_i2c_bus_handle_t)BSP_I2C_NUM, &tp_io_config, &tp_io_handle), TAG, "Touch I2C init failed"); // 初始化FT5x06触摸屏 ESP_ERROR_CHECK(esp_lcd_touch_new_i2c_ft5x06(tp_io_handle, &tp_cfg, ret_touch)); return ESP_OK; } // 触摸屏初始化+添加LVGL输入设备接口 static lv_indev_t *bsp_display_indev_init(lv_disp_t *disp) { /* 初始化触摸屏底层 */ ESP_ERROR_CHECK(bsp_touch_new(&tp)); assert(tp); /* 配置LVGL触摸输入参数,绑定触摸屏接口 */ const lvgl_port_touch_cfg_t touch_cfg = { .disp = disp, .handle = tp, }; return lvgl_port_add_touch(&touch_cfg); } |
4. LVGL总初始化入口函数
实现bsp_lvgl_start函数,完成LVGL核心、显示设备、输入设备的一站式初始化,对外提供统一调用入口:
|
C // LVGL+显示+触摸总初始化函数 void bsp_lvgl_start(void) { /* 初始化LVGL核心运行环境 */ lvgl_port_cfg_t lvgl_cfg = ESP_LVGL_PORT_INIT_CONFIG(); lvgl_port_init(&lvgl_cfg); /* 初始化液晶屏并注册到LVGL */ disp = bsp_display_lcd_init(); /* 初始化触摸屏并注册到LVGL */ disp_indev = bsp_display_indev_init(disp); /* 开启液晶屏背光 */ bsp_display_backlight_on(); } |
5. 头文件声明与编译配置
- 在LCD.h中添加头文件引用与初始化函数声明,支持跨文件调用:
|
C #ifndef _LCD_H_ #define _LCD_H_ #include "driver/gpio.h" #include "driver/i2c.h" #include "esp_lcd_touch_ft5x06.h" #include "esp_lvgl_port.h" // LVGL总初始化函数声明 void bsp_lvgl_start(void); #endif |
- 修改LCD组件的CMakeLists.txt,添加LVGL相关依赖,确保编译正常:
|
CMake idf_component_register(SRCS "LCD.c" INCLUDE_DIRS "include" REQUIRES driver esp_lcd esp_lcd_touch_ft5x06 esp_lvgl_port) |
2.4 第四步:LVGL SDK配置与功能启用
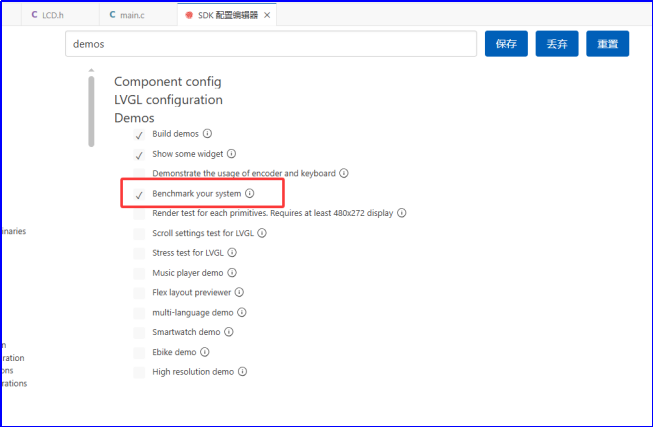
- 打开ESP-IDF的SDK配置编辑器(menuconfig),进入Component config -> LVGL configuration;
- 启用LVGL内置Demo:进入Demos选项,勾选Build demos,可选择基准测试demo、widget示例等用于移植验证;
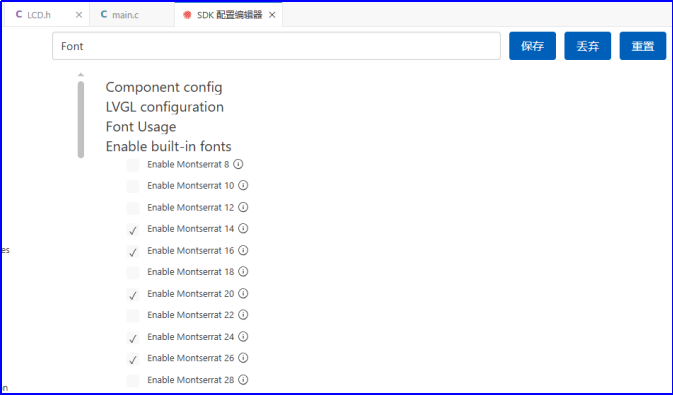
- 启用所需字体:进入Font Usage,勾选Enable built-in fonts,根据界面需求启用对应字号的Montserrat字体,推荐至少启用14/16/24号字体;
- 保存配置,ESP-IDF会自动更新编译参数。
2.5 第五步:移植验证与测试
在工程main.c的app_main入口函数中,添加LVGL初始化与Demo调用代码,完成移植验证:
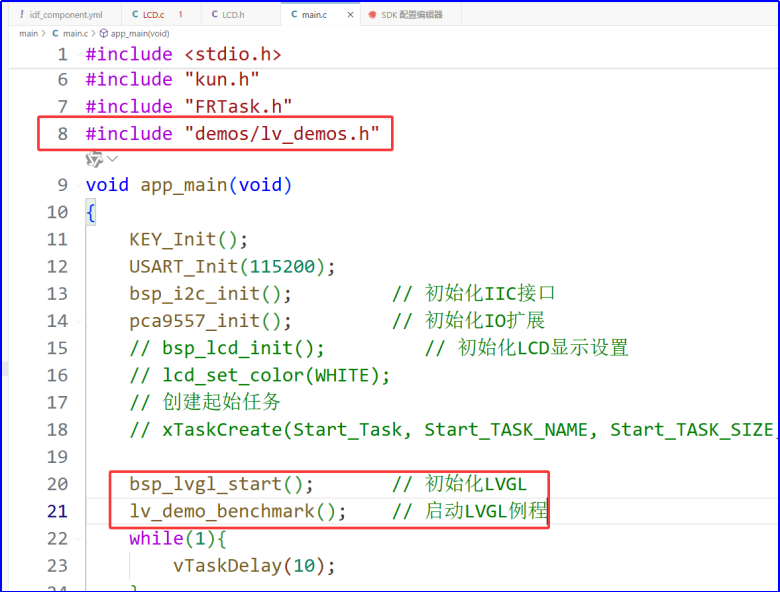
|
C #include <stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "LCD.h" // 引入LVGL Demo头文件 #include "demos/lv_demos.h" void app_main(void) { // 工程底层外设初始化 bsp_i2c_init(); pca9557_init(); // LVGL核心初始化(移植的核心函数) bsp_lvgl_start(); // 启动LVGL基准测试Demo,验证移植是否成功 lv_demo_benchmark(); // LVGL主循环,必须保持运行,处理界面刷新与事件 while(1){ vTaskDelay(pdMS_TO_TICKS(10)); } } |
编译烧录工程后,若LCD屏正常显示LVGL Demo界面、触摸屏可正常交互,说明LVGL9.4到ESP32S3的底层移植全部完成。
三、效率提升:GUI Guider可视化界面开发
纯代码编写LVGL界面开发效率低,尤其在机器人实训的团队协作开发中,GUI Guider作为NXP推出的LVGL官方可视化开发工具,支持拖拽式界面设计、代码自动生成、中文显示与实时预览,可大幅降低嵌入式GUI开发门槛,本节完整讲解GUI Guider的使用与界面开发全流程。
3.1 GUI Guider安装与基础配置
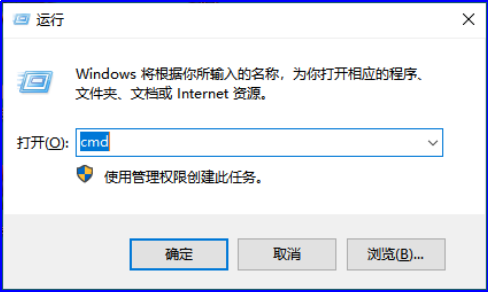
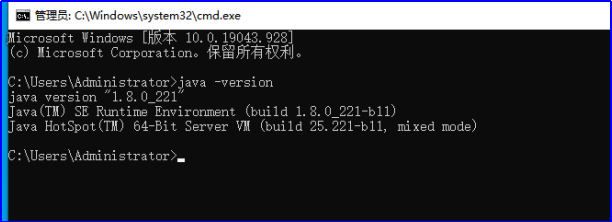
- JDK环境验证:按下WIN+R输入cmd打开控制台,执行java -version,若输出JDK版本信息(需1.8及以上)则环境正常,无环境需先安装JDK;
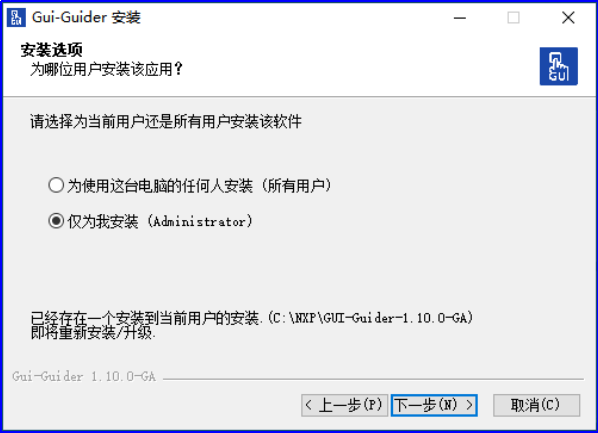
- 软件安装:双击GUI Guider安装包,选择中文语言,按指引完成安装,安装路径建议无中文、无空格;

- 软件初始化:打开软件后注册并登录账户,进入设置 -> IDE设置,将界面语言设置为中文,完成基础配置。

3.2 工程新建与参数匹配
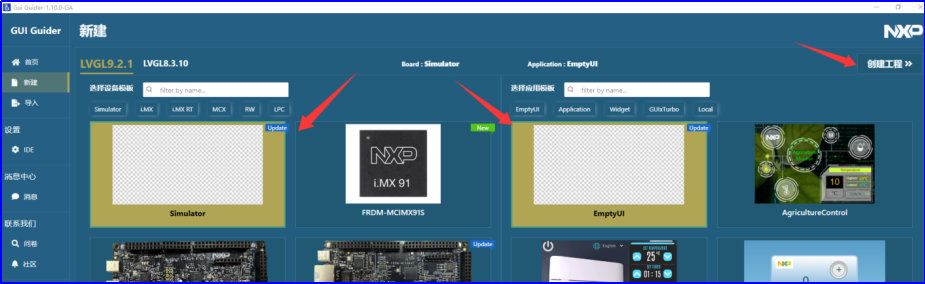
- 点击软件首页新建,选择与移植一致的LVGL9.4版本,开发板选择Simulator,应用模板选择EmptyUI(空白工程);
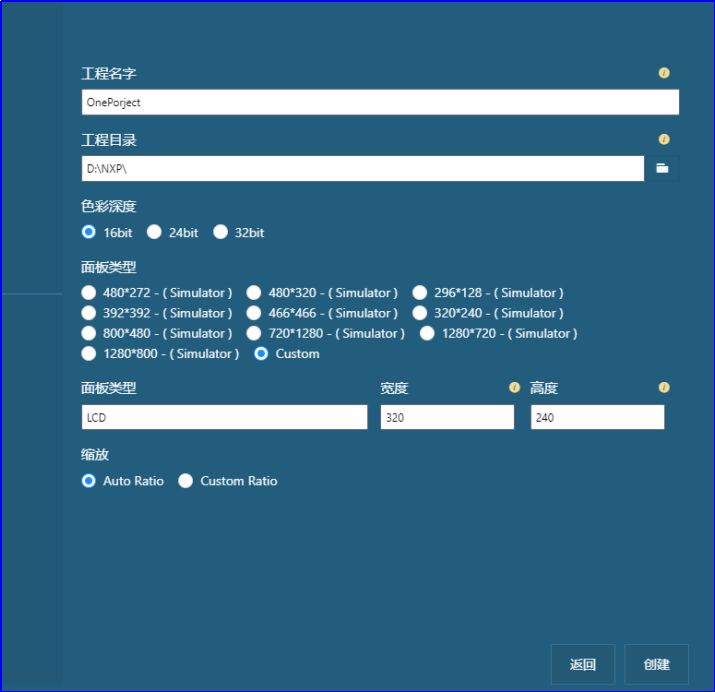
- 配置工程参数:设置工程名称与存储路径,色彩深度选择16bit(与ESP32 LCD屏匹配),面板分辨率填写与实际屏幕一致的参数(如480*320);
- 点击创建,完成GUI工程初始化。
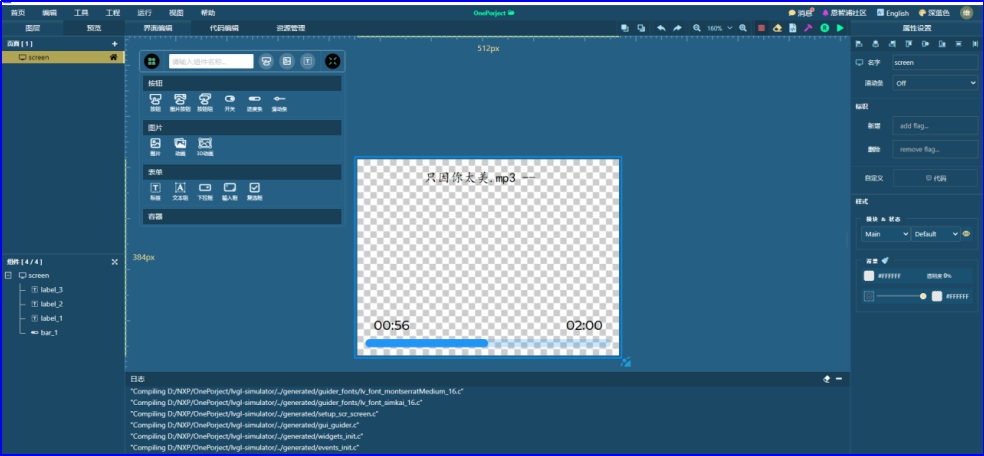
3.3 界面拖拽式设计
GUI Guider界面分为三大核心区域,完全适配零基础开发:
- 左侧:组件库与页面管理区,包含按钮、标签、进度条(Bar)、滑块、图表等LVGL全量组件;
- 中间:画布绘制区,可直接拖拽组件到画布中,实时调整位置与尺寸;
- 右侧:属性与样式面板,可修改组件名称、尺寸、颜色、字体、对齐方式等所有属性,完全匹配LVGL原生API。
机器人实训界面设计建议:
- 基础信息区:使用Label标签组件,显示机器人运行状态、时间、WiFi连接状态;
- 数据可视化区:使用Bar进度条组件,显示电池电量、传感器距离、电机PWM占空比;
- 控制交互区:使用Button按钮组件,实现机器人前进、后退、启停等手动控制功能。
设计完成后,点击右上角三角形运行按钮,可在模拟器中实时预览界面效果,反复调整至符合项目需求。
3.4 中文显示配置(核心痛点解决)
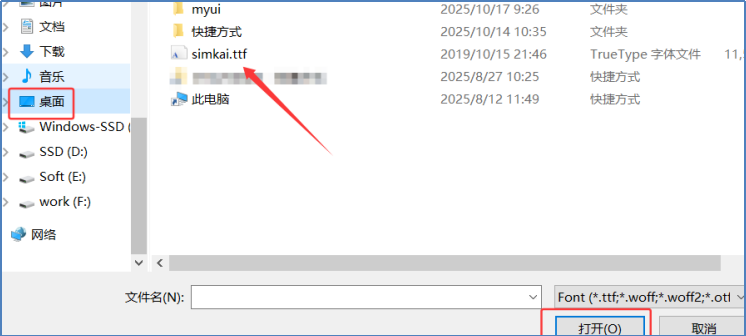
GUI Guider默认仅支持少量中文字体,需手动导入字体文件实现中文正常显示,步骤如下:
- 打开Windows系统字体路径C:\Windows\Fonts,复制所需的中文字体(如微软雅黑、宋体、楷体simkai.ttf)到桌面或自定义文件夹(无法直接在软件中访问系统字体目录);
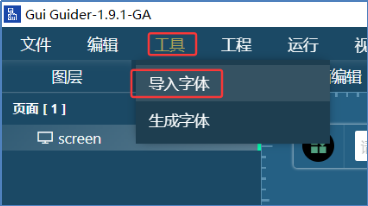
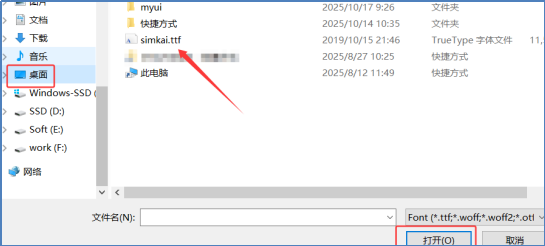
- 在GUI Guider中点击顶部菜单栏工具 -> 导入字体,选择复制出来的字体文件,完成导入;
- 选中需要显示中文的组件,在右侧属性面板的字体选项中,选择已导入的中文字体,即可实现中文正常显示,无乱码问题。
四、工程落地:GUI Guider代码移植到ESP32S3
GUI Guider设计完成的界面会自动生成标准化C代码,只需完成简单的移植操作,即可将可视化界面烧录到ESP32S3开发板中,实现设计到硬件落地的全流程闭环。
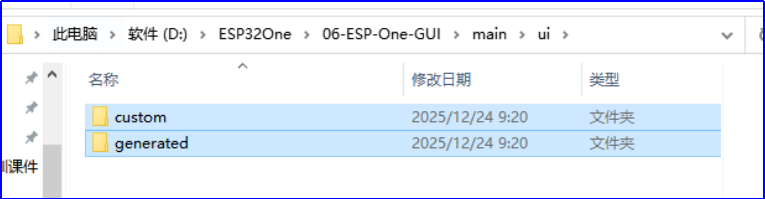
4.1 第一步:获取生成的核心代码
在GUI Guider工程根目录中,找到两个核心文件夹,这是移植所需的全部文件:
- generated:自动生成的界面代码,包含组件创建、页面初始化、字体配置等所有可视化设计对应的代码;
- custom:自定义代码文件夹,用于存放用户编写的事件回调、业务逻辑代码,避免软件更新时覆盖自定义内容。

4.2 第二步:工程文件部署
- 在ESP32工程的main目录下,新建ui文件夹;
- 将上述custom和generated两个文件夹,完整拷贝到新建的ui文件夹中。
4.3 第三步:CMake编译配置修改
修改main目录下的CMakeLists.txt,通过批量递归的方式添加源文件与头文件路径,无需逐个添加.c文件,适配GUI Guider生成的大量代码文件:
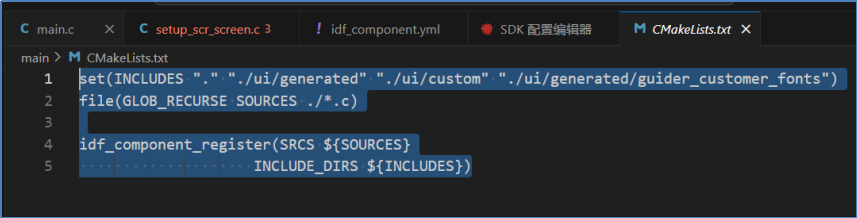
|
CMake # 添加头文件包含路径 set(INCLUDES "." "./ui/generated" "./ui/custom" "./ui/generated/guider_customer_fonts") # 递归查找当前目录及子目录下所有.c源文件 file(GLOB_RECURSE SOURCES ./*.c) # 注册组件,将GUI代码加入工程编译 idf_component_register(SRCS ${SOURCES} INCLUDE_DIRS ${INCLUDES}) |
4.4 第四步:主函数调用与界面运行
修改main.c文件,引入GUI头文件,添加界面初始化代码,即可实现GUI Guider设计的界面在ESP32硬件上运行:
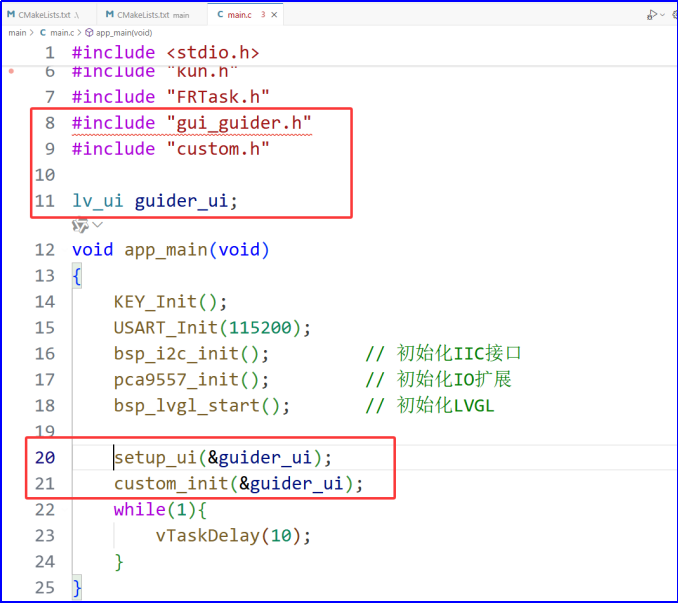
|
C #include <stdio.h> #include "freertos/FreeRTOS.h" #include "freertos/task.h" #include "LCD.h" // 引入GUI Guider生成的头文件 #include "gui_guider.h" #include "custom.h" // GUI全局结构体 lv_ui guider_ui; void app_main(void) { // 工程底层外设初始化 bsp_i2c_init(); pca9557_init(); // LVGL核心初始化 bsp_lvgl_start(); // GUI Guider界面初始化 setup_ui(&guider_ui); // 自定义代码初始化(事件回调、业务逻辑) custom_init(&guider_ui); // LVGL主循环,处理界面刷新与触摸事件 while(1){ lv_timer_handler(); // LVGL事件处理函数,必须持续调用 vTaskDelay(pdMS_TO_TICKS(5)); } } |
4.5 可选:Flash分区表配置
若界面包含大量图片、字体文件,固件体积较大,需自定义分区表,避免固件烧录失败:
- 在工程根目录新建partitions.csv分区表文件,配置足够的APP固件分区与存储分区;
- 打开SDK配置编辑器,进入Partition Table,勾选Custom partition table CSV,填写分区表文件名partitions.csv,设置分区表偏移量为0x8000;
- 保存配置,重新编译即可。
五、机器人场景实战:功能落地与交互开发
完成基础界面移植后,本节结合机器人实训的典型场景,实现Bar组件数据可视化、定时器实时刷新、按钮触摸交互三大核心功能,所有代码可直接复用到机器人项目中。
5.1 场景1:Bar组件实现机器人电池电量可视化
Bar组件是LVGL中数值可视化的核心控件,完美适配机器人电池电量、传感器距离、电机转速等数值的可视化显示,核心实现代码如下:
|
C #include "gui_guider.h" #include "lvgl.h" // 电池电量Bar组件更新函数 void robot_battery_update(lv_ui *ui, int32_t battery_percent) { // 限制电量数值在0-100范围内 battery_percent = lv_clamp(battery_percent, 0, 100); // 更新Bar组件数值,开启动画效果 lv_bar_set_value(ui->screen_bar_battery, battery_percent, LV_ANIM_ON); // 更新电量百分比标签 char buf[16]; sprintf(buf, "电量:%d%%", battery_percent); lv_label_set_text(ui->screen_label_battery, buf); // 低电量报警:电量低于20%时,Bar组件变为红色 if(battery_percent < 20){ lv_obj_set_style_bg_color(ui->screen_bar_battery, lv_color_hex(0xFF0000), LV_PART_INDICATOR); }else{ lv_obj_set_style_bg_color(ui->screen_bar_battery, lv_color_hex(0x00FF00), LV_PART_INDICATOR); } } |
5.2 场景2:ESP32定时器实现数据实时刷新
机器人运行过程中,需实时更新传感器数据、运行时间等信息,结合ESP32硬件定时器,可实现界面数据的毫秒级刷新,核心实现步骤如下:
1. 定时器驱动代码实现
在FRTask.c中添加定时器初始化与回调函数:
|
C #include "esp_timer.h" #include "FRTask.h" // 定时器全局结构体 typedef struct { uint32_t time_sec; uint8_t hour; uint8_t minute; uint8_t second; int32_t battery_val; int32_t distance_val; } TIMER_Type; TIMER_Type One_timer = {0}; // 定时器回调函数,1秒触发一次 void ESP_Timer_Callback(void *arg) { // 系统运行时间累计 One_timer.time_sec++; One_timer.hour = One_timer.time_sec / 60 / 60 % 24; One_timer.minute = One_timer.time_sec / 60 % 60; One_timer.second = One_timer.time_sec % 60; // 此处添加传感器数据采集:ADC采集电池电压、超声波采集距离 // One_timer.battery_val = adc_get_battery_percent(); // One_timer.distance_val = hc_sr04_get_distance(); } // 定时器初始化函数 void ESP_Timer_Init(void) { esp_timer_create_args_t timer_args = { .callback = &ESP_Timer_Callback, .name = "robot_timer", .arg = NULL, .dispatch_method = ESP_TIMER_TASK, }; esp_timer_handle_t timer_handle; // 创建定时器 esp_timer_create(&timer_args, &timer_handle); // 启动周期定时器,1000000us = 1s,可根据需求调整刷新周期 esp_timer_start_periodic(timer_handle, 1000000); } |
2. 主循环中实时更新界面
在main.c的主循环中,添加数据判断与界面更新逻辑,避免频繁刷新界面导致卡顿:
|
C void app_main(void) { // 底层初始化 bsp_i2c_init(); pca9557_init(); bsp_lvgl_start(); // 定时器初始化 ESP_Timer_Init(); // GUI界面初始化 setup_ui(&guider_ui); custom_init(&guider_ui); uint32_t last_sec = 0; char time_str[16] = {0}; while(1){ // 仅当时间更新时,刷新界面 if(last_sec != One_timer.time_sec){ last_sec = One_timer.time_sec; // 更新系统运行时间 sprintf(time_str, "%02d:%02d:%02d", One_timer.hour, One_timer.minute, One_timer.second); lv_label_set_text(guider_ui.screen_label_time, time_str); // 更新电池电量显示 robot_battery_update(&guider_ui, One_timer.battery_val); } lv_timer_handler(); vTaskDelay(pdMS_TO_TICKS(5)); } } |
5.3 场景3:按钮触摸交互实现机器人运动控制
结合LVGL事件回调机制,实现触摸屏按钮点击控制机器人电机运动,核心代码如下:
|
C // 按钮点击事件回调函数 void btn_robot_move_event_cb(lv_event_t *e) { lv_event_code_t code = lv_event_get_code(e); // 获取点击的按钮对象 lv_obj_t *btn = lv_event_get_target(e); // 获取用户自定义数据 lv_ui *ui = lv_event_get_user_data(e); // 处理点击事件 if(code == LV_EVENT_CLICKED){ if(btn == ui->screen_btn_forward){ // 前进按钮点击:调用电机前进函数 // robot_motor_forward(50); lv_label_set_text(ui->screen_label_status, "运行状态:前进"); } else if(btn == ui->screen_btn_back){ // 后退按钮点击:调用电机后退函数 // robot_motor_back(50); lv_label_set_text(ui->screen_label_status, "运行状态:后退"); } else if(btn == ui->screen_btn_stop){ // 停止按钮点击:调用电机停止函数 // robot_motor_stop(); lv_label_set_text(ui->screen_label_status, "运行状态:停止"); } } } // 在custom_init中绑定按钮事件 void custom_init(lv_ui *ui) { // 为前进、后退、停止按钮绑定点击事件 lv_obj_add_event_cb(ui->screen_btn_forward, btn_robot_move_event_cb, LV_EVENT_CLICKED, ui); lv_obj_add_event_cb(ui->screen_btn_back, btn_robot_move_event_cb, LV_EVENT_CLICKED, ui); lv_obj_add_event_cb(ui->screen_btn_stop, btn_robot_move_event_cb, LV_EVENT_CLICKED, ui); } |
六、实训避坑指南:高频问题排查与性能优化
结合多年机器人实训教学与嵌入式项目开发经验,汇总LVGL开发中90%的高频问题与解决方案,同时提供工程化性能优化策略,帮助读者快速排坑,提升项目稳定性。
6.1 高频问题排查表
|
问题现象 |
核心原因 |
标准化解决方法 |
|
LCD屏显示花屏、画面颠倒 |
1. LVGL旋转配置与液晶屏底层驱动不一致;2. 绘制缓存设置过小 |
1. 统一液晶屏与LVGL的swap_xy/mirror_x/mirror_y配置;2. 适当增大BSP_LCD_DRAW_BUF_HEIGHT至20-50 |
|
触摸屏无响应/触摸坐标偏移 |
1. 触摸屏I2C初始化失败;2. 触摸坐标旋转配置与液晶屏不匹配 |
1. 检查I2C总线与引脚配置,验证触摸屏底层驱动是否正常;2. 保证触摸屏与液晶屏的swap_xy/mirror配置完全一致 |
|
GUI Guider界面不显示/组件丢失 |
1. LVGL定时器未在主循环持续调用;2. 组件父对象设置错误;3. CMake配置未包含GUI代码 |
1. 确保主循环中持续调用lv_timer_handler();2. 组件必须挂载到屏幕根对象;3. 检查CMakeLists.txt的头文件路径与源文件递归配置 |
|
中文显示乱码/方框 |
1. 字体未正确导入;2. 组件未选择中文字体;3. 工程编码非UTF-8 |
1. 按教程重新导入中文字体,确保编译无报错;2. 中文组件必须选择已导入的中文字体;3. 工程文件编码统一设置为UTF-8 |
|
编译报错:undefined reference to xxx |
1. 源文件未加入编译;2. 头文件路径未配置;3. 组件依赖缺失 |
1. 检查CMakeLists.txt的file(GLOB_RECURSE)配置是否覆盖所有.c文件;2. 补全头文件包含路径;3. 重新拉取LVGL相关组件 |
|
界面卡顿、刷新延迟 |
1. 主循环中vTaskDelay延时过长;2. 未开启DMA加速;3. 定时器中执行耗时操作 |
1. 主循环延时设置为5-10ms;2. 开启LVGL的DMA缓存加速;3. 耗时操作放入独立FreeRTOS任务,不要在定时器/事件回调中执行 |
6.2 工程化性能优化策略
- 内存与缓存优化:根据ESP32S3的硬件内存,调整绘制缓存高度,推荐20-50;开启双缓存需保证硬件有足够的内存,避免内存溢出;
- 硬件加速优化:开启DMA传输(关闭SPIRAM),大幅提升LCD屏的绘制速度;ESP32S3可开启PSRAM存储字体、图片等大资源,释放片内内存;
- 任务调度优化:基于FreeRTOS将界面刷新、传感器采集、电机控制、无线通信分为独立任务,合理设置任务优先级(界面刷新优先级高于传感器采集,低于电机控制),避免界面阻塞;
- 资源精简优化:在SDK配置中关闭LVGL未使用的组件、demo与字体,减少固件体积;图片资源采用LVGL专用格式压缩,降低内存占用;
- 刷新优化:避免全界面频繁刷新,仅当数据变化时更新对应组件,减少LVGL的绘制开销。
七、总结与拓展方向
本文完整实现了LVGL9.4底层移植、GUI Guider可视化开发、机器人场景功能落地全流程,从硬件驱动到上层界面,从基础显示到交互逻辑,形成了一套标准化的ESP32嵌入式GUI开发方案,完全适配高校机器人设计与应用综合实训、中小型嵌入式智能设备开发。
通过本教程的学习,读者可掌握以下核心能力:
- ESP-IDF框架下LVGL图形库的标准化移植与底层适配;
- GUI Guider拖拽式可视化界面开发与代码移植;
- LVGL核心组件的使用、事件交互与实时数据刷新;
- 嵌入式GUI开发的问题排查与工程化性能优化。
实训拓展方向
- 多组件集成开发:结合LVGL官方文档,添加图表、滑块、列表、键盘、画布等组件,开发完整的机器人主控全功能界面;
- 物联网远程联动:将ESP32接入WiFi与MQTT协议,实现手机APP远程查看机器人传感器数据、远程控制界面参数更新,打造物联网机器人;
- 多任务协同优化:基于FreeRTOS实现界面显示、传感器采集、电机控制、无线通信的多任务并行处理,提升机器人系统的实时性与稳定性;
- 主题与动画定制:根据机器人的产品风格,定制LVGL全局主题、组件样式与切换动画,提升界面的美观度与交互体验;
- 多页面与菜单开发:实现开机引导页、主控制页、参数设置页、数据统计页的多页面切换,打造完整的嵌入式人机交互系统。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 7
7 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)