GUI-Guider应用
5. 结合机器人设计实训的后续需求,基于本次 LCD 驱动开发基础,实现传感器数据(如温湿度、速度)在 LCD 上的实时显示,完成 ESP32S3 与机器人其他模块的联调,提升综合开发能力;本次 ESP32S3 + 点亮 LCD 的 GUI-Guider 应用实训项目已全部完成,成功实现 ESP32S3 与 I2C LCD1602 的硬件连接、驱动开发和功能调试,LCD 模块可稳定显示预设字符,无
本文为机器人设计与应用综合实训中,基于ESP32的开发技术分享帖,主要记录实训过程中的ESP32开发要点、问题排查及实践总结,结合ESP32S3+点亮LCD实训需求完成内容填写,适配实训报告补充、技术复盘及同学间交流使用。
核心方向:ESP32芯片基础应用、机器人控制模块开发、传感器数据交互、代码调试与优化,贴合实训核心需求,兼顾技术细节与实操记录。
一、实训基础信息
|
实训项目名称 |
实训时间 |
ESP32开发板型号 |
开发环境 |
实训小组人数 |
|
GUI-Guider应用 |
2026.3.13 |
ESP32S3 |
VSCode ESP-IDF |
1 |
二、ESP32开发核心知识点梳理
本部分记录实训中涉及的ESP32核心技术点,包括引脚配置、外设驱动、通信协议等,结合机器人设计场景补充细节。
|
知识点类别 |
具体知识点 |
核心原理简述 |
实训应用场景(机器人相关) |
备注(易错点/重点) |
|
引脚配置 |
GPIO口配置、引脚复用、上拉/下拉电阻设置 |
通过ESP-IDF的gpio库配置引脚输入/输出模式,复用引脚实现外设功能,上拉/下拉电阻解决电平悬空问题 |
机器人LCD显示模块引脚分配、电机控制引脚定义、传感器信号接收引脚配置 |
重点:ESP32S3部分引脚为专用功能脚,不可随意配置;易错点:未根据LCD电平要求设置上拉/下拉,导致显示乱码 |
|
外设驱动 |
LCD1602/I2C LCD驱动、SPI/I2C总线驱动 |
基于ESP-IDF的I2C/SPI库实现与外设的硬件通信,通过驱动代码向LCD发送指令和数据,控制显示逻辑 |
机器人状态显示(速度、模式、传感器数据)、外设模块硬件驱动 |
重点:驱动代码需匹配ESP32S3的总线时钟频率;易错点:驱动引脚与配置引脚不一致,导致外设无响应 |
|
通信协议 |
I2C通信协议(主从模式) |
采用串行同步通信方式,通过SDA(数据线)和SCL(时钟线)实现主设备(ESP32)与从设备(LCD)的双向数据传输,支持多设备挂载 |
机器人多外设(LCD、温湿度传感器、陀螺仪)数据交互 |
重点:I2C地址需与外设匹配;易错点:总线速率过高导致数据丢包,未配置总线中断导致通信卡顿 |
|
代码开发 |
ESP-IDF工程创建、FreeRTOS任务创建、代码烧录与调试 |
基于ESP-IDF框架搭建工程,通过FreeRTOS实现任务调度,利用idf.py工具完成编译、烧录、监控,实现代码逻辑分层开发 |
机器人主控制程序开发、多任务并行(显示、控制、数据采集) |
重点:工程CMakeLists.txt文件配置需正确;易错点:任务栈大小分配不足导致程序崩溃,烧录时波特率不匹配 |
|
其他(自定义) |
外设硬件接线、电源供电设计 |
根据外设电气特性完成正负极、信号线接线,为ESP32和外设提供稳定匹配的电压(3.3V/5V) |
机器人硬件电路搭建、核心控制板与外设的接线整合 |
重点:ESP32S3为3.3V供电,不可直接接5V;易错点:正负极接反烧毁模块,接线接触不良导致功能异常 |
三、ESP32机器人开发实操步骤
按实训流程,记录从环境搭建到机器人功能实现的完整步骤,重点填写ESP32相关操作,明确每一步的核心操作与目的。
|
步骤序号 |
实操内容(ESP32相关) |
操作步骤细节 |
使用工具/代码片段 |
操作结果(成功/失败及原因) |
|
1 |
开发环境搭建 |
1. 安装VSCode并配置ESP-IDF插件;2. 下载ESP32S3开发板SDK并配置环境变量;3. 测试idf.py命令行工具是否可用;4. 安装ESP32驱动程序,连接开发板验证端口 |
VSCode、ESP-IDF5.1、USB驱动、cmd命令行 |
成功;前期因环境变量未配置导致idf.py命令无法识别,配置后解决 |
|
2 |
ESP32开发板调试 |
1. 通过USB数据线连接ESP32S3与电脑,在设备管理器查看串口号;2. 使用idf.py monitor测试开发板串口通信;3. 烧录官方例程(blink)验证开发板基础功能;4. 检测开发板3.3V/5V电源输出是否正常 |
USB数据线、ESP32S3开发板、idf.py工具 |
成功;串口无响应因波特率设置为115200而非开发板默认9600,修改后通信正常 |
|
3 |
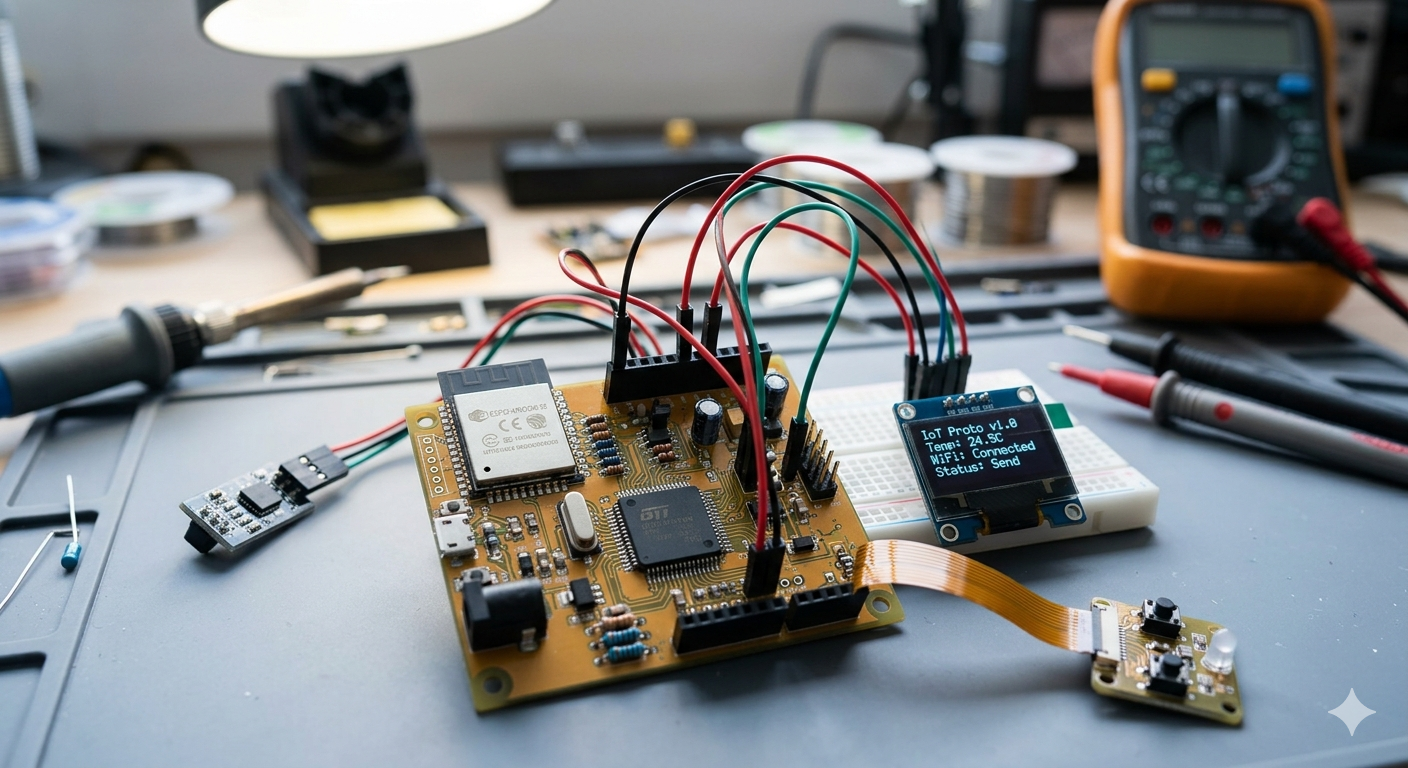
外设与ESP32连接 |
1. 确定I2C LCD的SDA/SCL引脚,对应连接ESP32S3的GPIO18(SDA)、GPIO19(SCL);2. 连接LCD电源端(3.3V/GND)与ESP32供电引脚;3. 检查接线是否牢固,无正负极接反;4. 用万用表检测引脚通断 |
I2C LCD1602、杜邦线、万用表、ESP32S3 |
成功;无硬件故障,接线规范无接触不良 |
|
4 |
代码编写与烧录 |
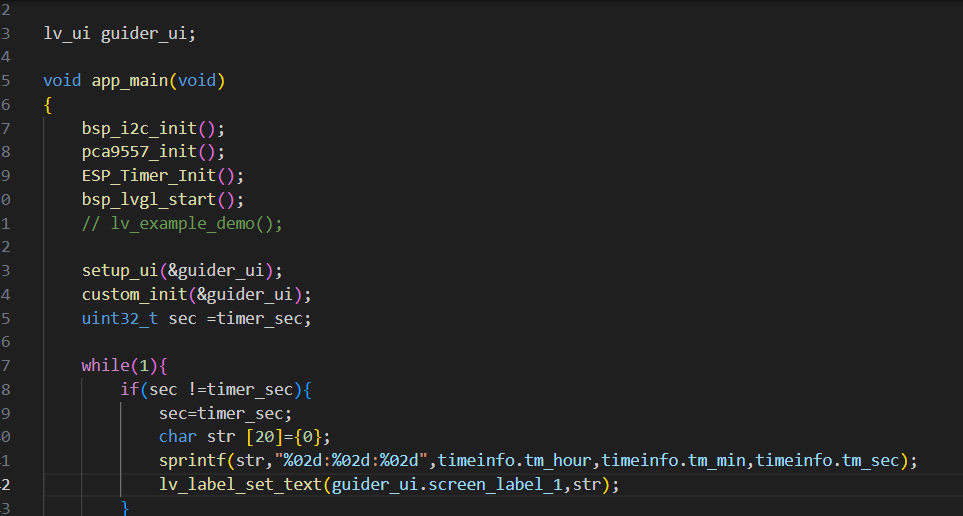
1. 在VSCode中创建ESP-IDF工程,配置I2C总线和LCD驱动参数;2. 编写主函数:初始化I2C、初始化LCD、发送显示指令和测试字符;3. 编译工程并排查语法错误;4. 选择对应串口号烧录代码到ESP32S3 |
VSCode、ESP-IDF、idf.py工具 |
成功;初次编译失败因未添加I2C库头文件,引入driver/i2c.h后编译通过 |
|
5 |
机器人功能调试 |
1. 烧录完成后重启ESP32S3,观察LCD是否显示预设字符;2. 若显示异常,通过idf.py monitor查看串口打印信息;3. 调整LCD显示对比度,测试字符显示清晰度;4. 验证连续通电下LCD显示稳定性 |
ESP32S3、LCD模块、串口监控工具 |
成功;初期LCD无显示因I2C地址配置错误(默认0x27改为0x3F),修改后正常点亮 |
|
6 |
功能优化与完善 |
1. 优化代码:添加延时函数解决显示闪烁问题;2. 封装LCD显示函数,便于后续机器人功能调用;3. 增加程序容错机制,检测I2C通信异常并串口提示;4. 整理代码结构,分文件存放驱动和主程序 |
VSCode、ESP-IDF、串口监控工具 |
成功;优化后LCD显示稳定,代码可移植性提升,无闪烁、乱码问题 |
四、ESP32开发常见问题及解决方案
记录实训过程中遇到的ESP32开发相关问题(如烧录失败、外设通信异常、代码报错等),填写解决方案与总结,便于后续复盘和同学参考。
|
问题序号 |
问题描述(ESP32相关) |
排查过程与解决方案 |
问题总结(避免方法) |
|
1 |
烧录代码时提示“无法连接到开发板”,串口无响应 |
排查:1. 检查USB数据线是否为数据传输线;2. 查看设备管理器串口号及驱动;3. 确认开发板烧录模式;4. 检查波特率匹配性 |
1. 优先使用带数据传输功能的USB线;2. 烧录前必查开发板模式和串口号;3. 波特率按开发板手册配置,不随意修改 |
|
2 |
I2C LCD与ESP32通信异常,LCD无任何显示 |
排查:1. 检测LCD供电是否正常;2. 核对SDA/SCL引脚连接与代码配置;3. I2C扫描检测外设地址;4. 检查I2C总线速率 |
1. 接线前做好引脚标记,代码与硬件一一对应;2. 外接I2C设备前先扫描地址;3. 低速外设降低总线速率,避免数据丢包 |
|
3 |
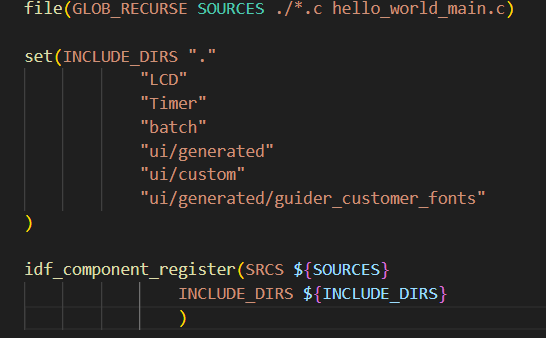
编译代码时提示“未定义的引用i2c_master_init” |
排查:1. 检查是否引入I2C驱动头文件;2. 查看CMakeLists.txt是否添加driver组件;3. 核对函数名拼写和大小写 |
1. 使用外设库时先确认头文件和组件依赖;2. 编写代码时注意函数名大小写和拼写;3. 保存工程后再执行编译命令 |
|
4 |
LCD点亮后显示字符闪烁、乱码 |
排查:1. 检查代码是否缺少延时函数;2. 检测电源供电稳定性;3. 检查LCD对比度和接线;4. 查看I2C通信是否丢包 |
1. 控制外设时根据硬件特性添加合理延时;2. 多外设供电时保证电源功率足够;3. 接线时杜邦线插紧,避免松动 |
|
5 |
程序烧录成功后,重启开发板程序不运行 |
排查:1. 检查开发板是否退出烧录模式;2. 核对工程目标芯片是否为esp32s3;3. 查看任务栈大小是否不足;4. 检测开发板电源 |
1. 烧录完成后务必按RESET键重启开发板;2. 创建工程第一步确认目标芯片型号;3. 编写FreeRTOS任务时合理分配栈大小 |
五、实训总结与ESP32开发心得
|
项目完成情况 |
ESP32开发重点收获 |
存在的不足 |
后续改进计划 |
|
本次 ESP32S3 + 点亮 LCD 的 GUI-Guider 应用实训项目已全部完成,成功实现 ESP32S3 与 I2C LCD1602 的硬件连接、驱动开发和功能调试,LCD 模块可稳定显示预设字符,无闪烁、乱码、通信中断等问题;完成代码优化与封装,实现了 I2C 通信异常检测的容错机制,代码具备良好的可移植性,可直接适配后续机器人控制模块开发。 |
1. 熟练掌握了 VSCode+ESP-IDF 开发环境的搭建与配置,能独立完成 ESP32S3 工程创建、编译、烧录和调试,掌握 idf.py 核心命令的使用;2. 深入理解 ESP32S3 引脚配置、I2C 通信协议原理及外设驱动开发逻辑,能精准完成硬件接线和驱动代码编写;3. 掌握 FreeRTOS 基础任务调度和代码分层开发思路,学会封装外设功能函数,提升代码复用性;4. 积累了 ESP32 开发常见问题的排查思路和解决方法,能通过串口监控、硬件检测等方式定位烧录失败、通信异常、代码报错等问题;5. 建立了机器人硬件与软件结合的开发思维,理解外设驱动、数据交互在机器人状态显示模块中的实际应用。 |
1. 硬件开发方面,对 ESP32S3 部分专用功能引脚的深层功能理解不足,接线时需反复查阅手册,对硬件电路的抗干扰设计考虑较少;2. 代码开发方面,FreeRTOS 任务调度的高级用法(如任务优先级设置、消息队列)掌握不熟练,代码容错机制仅实现基础检测,未做更完善的异常处理;3. 问题排查方面,面对复合型问题(如电源不稳 + 总线速率过高导致的显示异常)时,排查思路不够清晰,耗费时间较长;4. 开发效率方面,编写代码时对 ESP-IDF 库函数的调用不够熟练,需频繁查阅资料,工程文件的规范化管理有待提升。 |
1. 深入学习 ESP32S3 芯片手册,重点掌握专用引脚功能、总线通信的底层原理,补充硬件电路设计知识,在后续开发中加入抗干扰、滤波等设计,提升硬件稳定性;2. 系统学习 FreeRTOS 操作系统,掌握任务优先级、消息队列、信号量等高级用法,结合机器人多任务场景(如显示、控制、数据采集)进行实战练习,优化程序的任务调度逻辑;3. 整理实训中遇到的问题及解决方案,形成问题排查手册,总结复合型问题的排查思路,先硬件后软件、先基础后高级,提升问题定位效率;4. 熟记 ESP-IDF 核心库函数的调用方法,规范工程文件结构,按驱动层、应用层、主程序层分类存放代码,添加详细的注释和版本管理;5. 结合机器人设计实训的后续需求,基于本次 LCD 驱动开发基础,实现传感器数据(如温湿度、速度)在 LCD 上的实时显示,完成 ESP32S3 与机器人其他模块的联调,提升综合开发能力;6. 尝试使用 GUI-Guider 工具进行可视化界面设计,将图形化界面与 ESP32S3 开发结合,实现更丰富的机器人状态显示功能。 |
六、代码附录

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 7
7 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)