开源!手搓AI 视觉大模型飞艇,ESP双核主控、1080P 高清图传、支持声控飞行、保持跟随、巡航拍摄、智能导航
主板搭载1080P 高清摄像头,配备气压计、六轴 IMU、磁力计等传感器与外设接口,固件系统集成了 AI 语音交互、视觉感知、姿态控制和实时图传等先进功能,同时支持手机App遥控和图传,便于二次开发。由于信息来源众多,若文章内容出现版权问题,或文中使用的图片、资料、下载链接等,如涉及侵权,请告知我们,我们将尽快处理。H.264 硬件编码:利用 ESP32-P4 的硬件编码能力,实现高效的视频压缩,

👁 源码交付,开启 IoT 物联网与 AI 融合的未来文末联系小编,获取项目源码
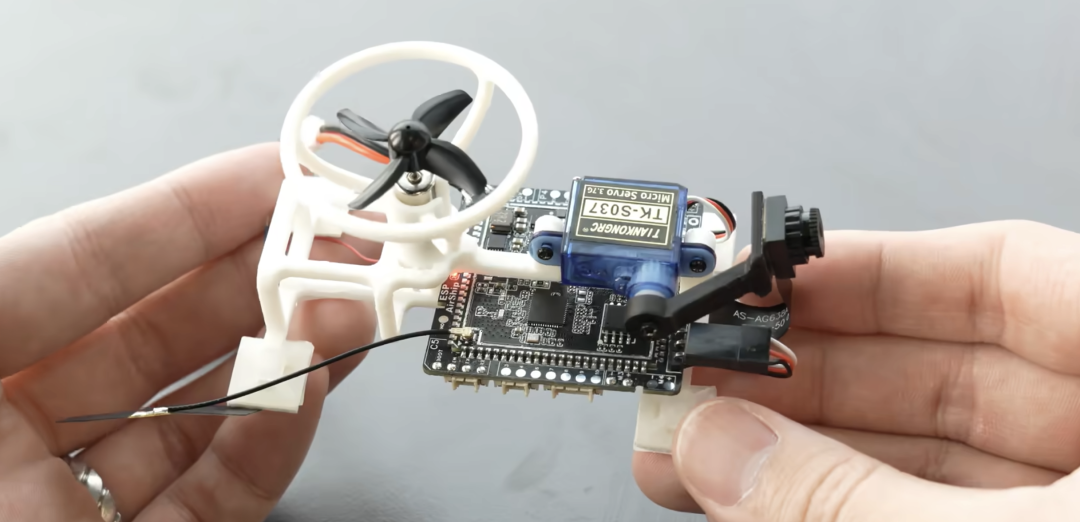
ESP-AirPuff 是一款基于 ESP32-P4双核主控 和 ESP32-C5通信模组的AI 视觉大模型智能飞艇,主板搭载1080P 高清摄像头,配备气压计、六轴 IMU、磁力计等传感器与外设接口,固件系统集成了 AI 语音交互、视觉感知、姿态控制和实时图传等先进功能,同时支持手机App遥控和图传,便于二次开发。
硬件配置概览:
-
采用 WTDKP4C5-S1 双核模组:发挥 ESP32-P4 的高性能计算与 ESP32-C5 的双频 Wi-Fi 6 连接优势
-
板载 1080P MIPI 摄像头
-
集成传感器:气压计、六轴 IMU、磁力计
-
执行与扩展:4 路电机驱动(支持正反转)、2路舵机接口(用于摄像头云台控制)
-
供电:1S 动力锂电池供电,板载充电管理,兼顾续航与维护便利
软件与控制能力概览:
-
基于 ESP-Brookesia AI 框架,集成 AI 语音交互与视觉识别
-
支持通过 MCP 控制飞行姿态与位置
-
融合多传感器数据提升抗扰能力,飞行状态更稳定
-
支持网页控制与实时高清图传
-
具备悬浮高度与旋转角度闭环控制,让飞行稳定可控、可预期
🎯 AI飞艇功能介绍

ESP-AirPuff 智能飞艇基于ESP-Brookesia AI 框架,深度融合了 AI 语音交互与视觉识别技术。它不仅支持自然的语言聊天和语音控飞,还能通过 MCP 协议精准操控飞行姿态与位置。得益于多传感器数据的融合,无人机抗干扰能力显著增强,飞行更加稳定。特别值得一提的是,它具备高度与旋转角度的闭环控制,让每一次飞行都稳如泰山、可控可预期。在使用体验上,无需下载安装任何 APP,只需打开浏览器即可实现网页控制与实时高清图传,真正做到了“即开即用”。
💻 AI 大模型视觉语音交互

通过接入 云端大模型,用户可以通过语音指令控制飞艇的上升、下降等基本动作,实现真正的“声控飞行”。硬件支持多麦克风远场语音识别,图像采集与反馈。
-
语音识别:支持语音指令识别,响应速度快,识别准确率高
-
上升下降控制:通过语音指令"上升"、"下降"等,直接控制飞艇高度
-
飞行模式切换:支持语音切换不同的飞行模式,如悬停模式、巡航模式等
-
状态查询:可通过语音查询飞艇当前状态,如电量、高度、位置等
🚀 定高与旋转角度闭环控制
-
气压计定高:融合气压计与加速度计获得准确的高度估计,进行闭环控制,修正浮力变化的影响
-
旋转角度控制:通过陀螺仪角速度闭环准确控制旋转角度。
🕹️ 摄像头实时图传与控制
板载 MIPI 摄像头 支持 H.264 编码的实时视频传输,为用户提供第一人称视角的飞行体验。
-
H.264 硬件编码:利用 ESP32-P4 的硬件编码能力,实现高效的视频压缩,降低带宽占用
-
低延迟传输:优化的传输协议和编码参数,实现低延迟的视频流传输
-
多分辨率支持:支持多种分辨率输出,可根据网络情况自动调整
-
云台控制:通过舵机接口控制摄像头云台,实现上下转动,扩大视野范围
-
本地存储:支持将视频流保存到 SD 卡 或 eMMC,实现飞行录像功能
🤖 核心硬件模块架构
主控模块
-
WTDKP4C5-S1 模组:内部集成 ESP32-P4 和 ESP32-C5 双芯片,其中
-
ESP32-P4:高性能双核主控,负责图像处理、编码、控制算法等核心功能
-
ESP32-C5:双频 Wi-Fi 6 连接芯片,负责无线通信和数据传输
音频系统
-
ES8311 音频编解码器:提供高质量的音频输出能力
-
ES7210 音频 ADC:用于外部声音采样与音频回采,为回声消除和声源定位提供硬件支持
-
NS4150B:音频功放
-
2014B 扬声器:用于音频播放
-
2 x 模拟麦克风:用于语音输入和声源定位
视频系统
SC2336 MIPI 摄像头:最大支持 1080P 图像采集,用于实时图传和视觉识别
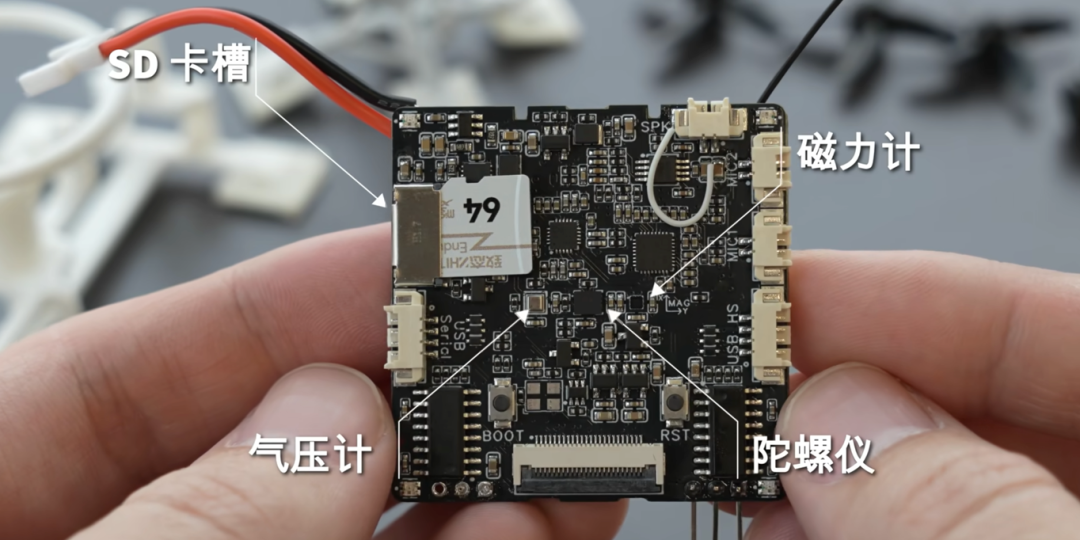
传感器系统
BMP581 气压计:用于高度测量和气压监测
BMI270 六轴 IMU:用于姿态检测和运动感知
BMM350 磁力计(可选):用于航向角测量和地磁校准
输出接口
-
4 x 空心杯电机驱动:每路支持正反转控制,用于驱动飞艇的推进器
-
前方推进器:2 个空心杯电机 + 螺旋桨,用于前进、后退、左右偏转控制
-
中央推进器:1 个空心杯电机 + 螺旋桨,用于上升、下降控制
-
备用:额外一路驱动备用
-
2 x 舵机接口:
-
-
接口 1:用于控制摄像头云台,实现摄像头角度调整
-
接口 2:预留用于二次开发
-
通信接口
-
高速 USB 接口:用于数据传输、固件升级和调试
-
预留 IO 口:用于扩展其他外设和功能
存储系统
-
SD 卡槽:eMMC 接口,支持高速 SD 卡,用于存储音频、飞行数据和视频录像
电源管理
-
动力锂电池供电:使用 250 mAh 动力锂电池,使用空中对接接口,便于更换。
-
TP4057:用于电池充电。

🌳 写在最后
ESP-AirPuff 智能飞艇 不仅可以作为赛博飞宠陪伴你,还可应用于多种场景:
-
航拍探索:从空中视角探索和拍摄,记录精彩瞬间
-
实时监控:实时查看飞艇周围环境,用于安全监控和巡检
-
商业活动:婚礼/派对/舞台活动等场合巡逻记录
-
教学演示:用于飞行教学和演示,直观展示飞行过程
开源项目地址:
https://oshwhub.com/esp-college/esp-airship
如有IoT 源码采购和项目交付需求,请扫码联系小编,微信号: beacon0418

往期推荐
☞开箱即用!国产开源30+AI视觉算法IoT智能物联网云平台
☞国产开源Web 工业IoT组态软件,支持Modbus、OPC,支持拖拉拽
☞4万元,国产信创私有化部署,破解县域无人机AI巡检平台落地难题
☞免费开源,千知AI知识图谱平台,支持DeepSeek、Qwen
☞智慧农业大爆发:AI+物联网+区块链重构“天空地”一体化监测
免责声明:本公众号所发布的内容来源于互联网,我们会尊重并维护原作者的权益。由于信息来源众多,若文章内容出现版权问题,或文中使用的图片、资料、下载链接等,如涉及侵权,请告知我们,我们将尽快处理。主理人微信: beacon0418

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 9
9 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)