用Matlab探索博弈论下的车辆换道模拟
首先,我们要定义模拟所需的参数。% 车辆数量% 自由行驶速度% 道路长度% 时间步长% 模拟时间% 换道概率这些参数是整个模拟的基础,它们决定了模拟场景的规模和一些基本规则。决定了道路上车辆的数量,车辆数不同会对交通流产生很大影响;freeSpeed设定了车辆在无阻碍情况下的行驶速度;roadLength定义了模拟道路的长度;timeStep是每次模拟的时间间隔,它决定了模拟的精细程度;表示整个模
matlab博弈论车辆换道 同时可以赠送博弈论学习资料论文。 首先定义模拟所需的参数,包括车辆数量、自由行驶速度、道路长度、时间步长、模拟时间、换道概率等。 然后初始化车辆状态,包括位置、速度和所在车道。 位置初始均匀分布在道路上,速度相同。 接下来进行模拟过程。 对于每个时间步长,先更新车辆速度。 根据交通流理论中的基本模型,车辆速度受到前车距离和速度差的影响。 如果前方有车且距离足够避免碰撞,则车辆可以加速;如果前方有车且距离不足以避免碰撞,则车辆应该减速;如果前方无车,则车辆可以加速。 此外,如果前方有车且速度差较大,车辆还有一定概率进行换道操作。 换道操作会导致车辆速度降低,并且会受到占有率惩罚和速度差惩罚的影响。 最后更新车辆位置,并可视化结果。
在交通流研究中,利用博弈论和Matlab来模拟车辆换道是一个很有趣的话题。今天就来给大家详细讲讲这个过程,文末还会给大家分享一些博弈论学习资料论文哦。
参数定义
首先,我们要定义模拟所需的参数。在Matlab中可以这样写:
numVehicles = 50; % 车辆数量
freeSpeed = 30; % 自由行驶速度
roadLength = 1000; % 道路长度
timeStep = 0.1; % 时间步长
simulationTime = 100; % 模拟时间
laneChangeProb = 0.2; % 换道概率这些参数是整个模拟的基础,它们决定了模拟场景的规模和一些基本规则。numVehicles决定了道路上车辆的数量,车辆数不同会对交通流产生很大影响;freeSpeed设定了车辆在无阻碍情况下的行驶速度;roadLength定义了模拟道路的长度;timeStep是每次模拟的时间间隔,它决定了模拟的精细程度;simulationTime表示整个模拟过程持续的时间;laneChangeProb则是车辆进行换道操作的概率。
车辆状态初始化
接着,我们要初始化车辆状态,包括位置、速度和所在车道。
positions = linspace(0, roadLength, numVehicles); % 位置初始均匀分布在道路上
speeds = ones(numVehicles, 1) * freeSpeed; % 速度相同
lanes = randi([1, 2], numVehicles, 1); % 随机分配所在车道这里用linspace函数将车辆位置均匀分布在道路上,ones函数让所有车辆初始速度相同,randi函数随机为每辆车分配车道。这样就设定好了车辆的初始状态,为后续模拟做好准备。
模拟过程
更新车辆速度
for t = 1:simulationTime / timeStep
for i = 1:numVehicles
if i < numVehicles
distanceToLead = positions(i + 1) - positions(i);
speedDiff = speeds(i + 1) - speeds(i);
if distanceToLead > 0 && distanceToLead < 50 % 前方有车且距离较近
speeds(i) = speeds(i) - 2; % 减速
elseif distanceToLead >= 50 % 前方有车且距离足够
speeds(i) = min(speeds(i) + 1, freeSpeed); % 加速
else % 前方无车
speeds(i) = min(speeds(i) + 1, freeSpeed); % 加速
end
if speedDiff > 10 && rand < laneChangeProb % 速度差较大且满足换道概率
% 换道操作
lanes(i) = 3 - lanes(i); % 换道
speeds(i) = speeds(i) - 5; % 速度降低
% 占有率惩罚和速度差惩罚可在此处根据实际情况添加逻辑
end
else
% 最后一辆车的情况,前方无车,加速
speeds(i) = min(speeds(i) + 1, freeSpeed);
end
end这段代码是模拟的核心部分。在每个时间步长内,对每辆车进行速度更新。先计算与前车的距离和速度差,如果前方有车且距离小于50,说明距离较近,车辆要减速;如果距离大于等于50,车辆可以适当加速;若前方无车,同样加速。当速度差大于10且随机数小于换道概率时,车辆会进行换道操作,同时速度降低。这里还可以进一步添加占有率惩罚和速度差惩罚的逻辑,比如根据车道占有率调整换道后的速度等。
更新车辆位置
positions = positions + speeds * timeStep;
% 处理车辆超出道路长度的情况
positions(positions > roadLength) = positions(positions > roadLength) - roadLength;速度更新完后,根据速度和时间步长更新车辆位置。同时,要处理车辆超出道路长度的情况,这里采用的方法是让超出的车辆回到道路起点,模拟循环的道路。
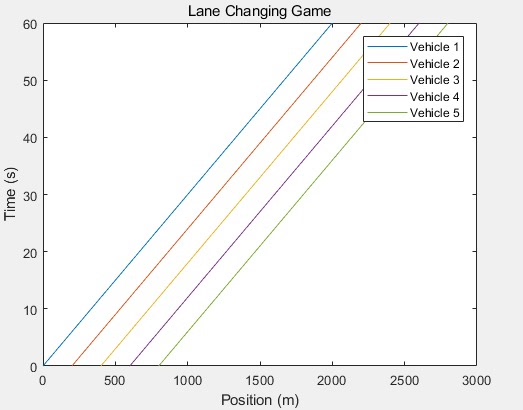
可视化结果
Matlab有丰富的可视化工具,这里简单用scatter函数展示车辆位置和车道的关系:
figure;
scatter(positions, lanes);
xlabel('Vehicle Position');
ylabel('Lane');
title('Vehicle Positions in Lanes');这段代码创建了一个散点图,横坐标是车辆位置,纵坐标是所在车道,直观展示了不同时刻车辆在道路上的分布情况。
博弈论学习资料论文分享
最后,给大家分享一些博弈论学习资料论文。《博弈论:基础》这本书籍的相关论文对博弈论基础概念和模型有很深入的讲解,适合初学者入门。还有《博弈论在交通流分析中的应用》这类论文,专注于博弈论在交通领域的实践,和我们今天讲的车辆换道模拟紧密相关,大家可以找来看看,进一步加深对博弈论在交通场景应用的理解。希望大家通过代码实践和理论学习,对博弈论下的车辆换道模拟有更深刻的认识。
matlab博弈论车辆换道 同时可以赠送博弈论学习资料论文。 首先定义模拟所需的参数,包括车辆数量、自由行驶速度、道路长度、时间步长、模拟时间、换道概率等。 然后初始化车辆状态,包括位置、速度和所在车道。 位置初始均匀分布在道路上,速度相同。 接下来进行模拟过程。 对于每个时间步长,先更新车辆速度。 根据交通流理论中的基本模型,车辆速度受到前车距离和速度差的影响。 如果前方有车且距离足够避免碰撞,则车辆可以加速;如果前方有车且距离不足以避免碰撞,则车辆应该减速;如果前方无车,则车辆可以加速。 此外,如果前方有车且速度差较大,车辆还有一定概率进行换道操作。 换道操作会导致车辆速度降低,并且会受到占有率惩罚和速度差惩罚的影响。 最后更新车辆位置,并可视化结果。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 0
0 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)