机器人设计与应用综合实训——ESP32开发技术分享
2. 学习 GUI-Guider 的事件配置和 ESP32 的中断处理,实现界面组件的交互功能(如按钮控制机器人运动);3. 保存工程并执行编译;成功完成 GUI-Guider 到 ESP32 的代码移植,实现了基于 LVGL 的图形化界面在 LCD 屏的正常显示,界面包含各类基础组件且中文显示正常,完成了机器人人机交互界面的基础开发。GUI-Guider 可视化生成 LVGL 界面代码,通过文件
本文为机器人设计与应用综合实训中,基于ESP32的开发技术分享帖,主要记录实训过程中的ESP32开发要点、问题排查及实践总结,表格部分留空供同学们根据自身实训情况填写,适配实训报告补充、技术复盘及同学间交流使用。
核心方向:ESP32芯片基础应用、机器人控制模块开发、传感器数据交互、代码调试与优化,贴合实训核心需求,兼顾技术细节与实操记录。
一、实训基础信息
|
实训项目名称 |
实训时间 |
ESP32开发板型号 |
开发环境 |
实训小组人数 |
|
ESP32 基于 GUI-Guider 的 LVGL 界面开发与移植 |
2026/3/13 |
ESP32-S3(实操适配型号) |
ESP-IDF、GUI-Guider(LVGL9.2.1/LVGL8.3.10) |
2 |
二、ESP32开发核心知识点梳理
本部分记录实训中涉及的ESP32核心技术点,包括引脚配置、外设驱动、通信协议等,结合机器人设计场景补充细节。
|
知识点类别 |
具体知识点 |
核心原理简述 |
实训应用场景 (机器人相关) |
备注 (易错点/重点) |
|
引脚配置 |
LCD 显示屏引脚配置 |
通过 GPIO 引脚实现 ESP32 与 LCD 的硬件连接,配置通信、数据、控制引脚的输入输出模式 |
机器人触控 / 显示面板的硬件驱动,实现机器人状态可视化显示 |
需严格匹配 LCD 型号的引脚定义,避免接错烧毁器件 |
|
外设驱动 |
LCD 屏驱动、LVGL 底层驱动适配 |
LVGL 作为图形库提供界面渲染能力,底层驱动实现 ESP32 对 LCD 的时序和数据传输控制 |
机器人的图形化界面显示,如传感器数据、运动模式可视化 |
驱动代码需与 LVGL 版本、ESP32 芯片型号匹配 |
|
通信协议 |
/ |
/ |
/ |
/ |
|
代码开发 |
GUI-Guider 工程创建与界面绘制、代码移植、CMakeLists.txt 配置、分区表配置 |
GUI-Guider 可视化生成 LVGL 界面代码,通过文件移植、编译配置将代码适配到 ESP32 的 ESP-IDF 工程中,分区表配置为 Flash 分配存储资源 |
机器人的人机交互界面开发,实现按钮、文本、进度条等组件的显示与操作 |
CMakeLists.txt 需正确添加 UI 文件路径;中文显示需导入字体文件 |
|
其他(自定义) |
LVGL 中文显示适配、ESP32 Flash 分区配置 |
通过导入 TrueType 字体文件为 LVGL 添加中文字体支持,修改 partitions.csv 为界面资源、程序运行分配 Flash 空间 |
机器人中文界面的显示,保证界面文字、资源正常存储 |
字体文件需选择合适的格式(ttf/woff);分区表需在 SDK 中完成配置生效 |
三、ESP32机器人开发实操步骤
按实训流程,记录从环境搭建到机器人功能实现的完整步骤,重点填写ESP32相关操作,明确每一步的核心操作与目的。
|
步骤序号 |
实操内容 (ESP32相关) |
操作步骤细节 |
使用工具/代码片段 |
操作结果 (成功/失败及原因) |
|
1 |
开发环境搭建 |
1. 安装 ESP-IDF 开发环境并配置环境变量;2. 安装 GUI-Guider 并选择 LVGL9.2.1/LVGL8.3.10 版本;3. 验证两个环境的基础编译运行功能ESP-IDF、GUI-Guider成功,环境可正常启动并完成基础工程编译2ESP32 开发板调试 |
ESP-IDF、GUI-Guider |
成功,环境可正常启动并完成基础工程编译 |
|
2 |
ESP32开发板调试 |
1. 连接 ESP32 开发板与电脑,安装串口驱动;2. 在 ESP-IDF 中完成开发板串口、Flash 参数配置;3. 烧录基础例程验证开发板通信正常 |
串口工具、ESP-IDF 烧录工具 |
成功,开发板可正常烧录并回传串口信息 |
|
3 |
外设与ESP32连接 |
1. 打开 GUI-Guider,选择 Simulator 设备模板、EmptyUI 应用模板;2. 设置工程名、目录、色彩深度(16/24/32bit)、面板分辨率(如 320*240);3. 拖拽按钮、文本、进度条等组件到绘制区,通过右侧属性区调整样式;4. 导入 simkai.ttf 字体文件实现中文显示;5. 编译运行模拟器验证界面效果 |
GUI-Guider、simkai.ttf 字体文件 |
成功,模拟器可正常显示设计的中文界面及各类组件 |
|
4 |
代码编写与烧录 |
1. 在 ESP32 的 ESP-IDF 工程 main 目录下新建 ui 文件夹;2. 从 GUI-Guider 工程中复制 custom、generated 文件夹到 ui 目录;3. 修改 main/CMakeLists.txt,添加 UI 文件路径和源文件检索规则;4. 将 partitions.csv 放入工程,在 SDK 配置编辑器中选择自定义分区表并指定该文件 |
/ |
成功,文件移植完成,配置文件修改无语法错误 |
|
5 |
机器人功能调试 |
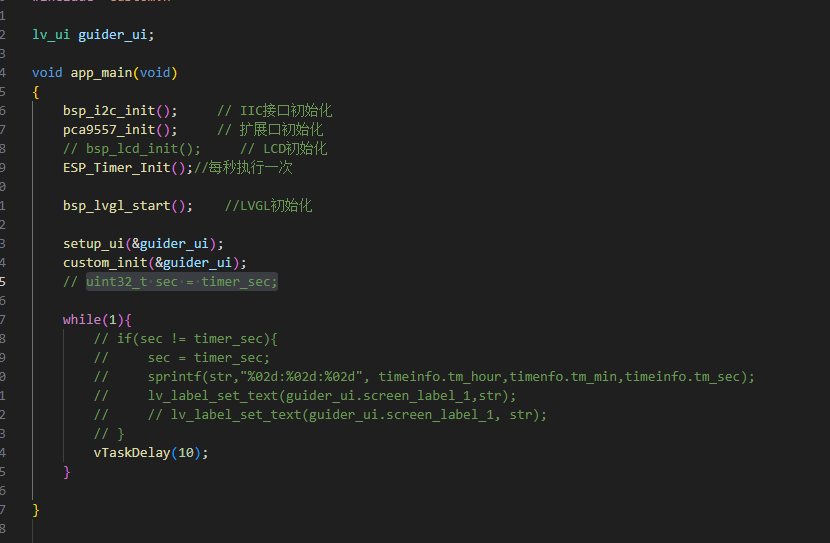
1. 清理 ESP32 工程 main.c 中无关代码;2. 在 main.c 中添加 GUI-Guider 界面初始化、显示的五行核心代码;3. 保存工程并执行编译;4. 连接开发板完成代码烧录 |
ESP-IDF 编译工具、烧录工具 |
成功,编译无报错,代码正常烧录到 ESP32 |
|
6 |
功能优化与完善 |
1. 给 ESP32 和 LCD 显示屏供电,连接硬件;2. 复位开发板,查看 LCD 屏是否显示 GUI-Guider 设计的界面;3. 测试界面组件的显示效果、中文显示是否正常 |
ESP32 开发板、LCD 显示屏 |
成功,LCD 屏正常显示设计的人机交互界面,中文、组件渲染无异常 |
四、ESP32开发常见问题及解决方案
记录实训过程中遇到的ESP32开发相关问题(如烧录失败、外设通信异常、代码报错等),填写解决方案与总结,便于后续复盘和同学参考。
|
问题序号 |
问题描述(ESP32相关) |
排查过程 |
解决方案 |
问题总结(避免方法) |
|
1 |
编译 ESP32 工程时提示 UI 相关头文件找不到 |
检查 CMakeLists.txt 中 INCLUDE_DIRS 是否添加了 ui/generated、ui/custom 等路径;检查文件移植路径是否正确 |
1. 核对并补全 CMakeLists.txt 中的 UI 文件路径;2. 确认 custom、generated 文件夹准确放在 main/ui 目录下 |
修改 CMakeLists.txt 后需保存,文件移植时严格按目录结构放置,避免路径层级错误 |
|
2 |
LCD 屏无显示,代码烧录正常 |
1. 检查 ESP32 与 LCD 的硬件引脚连接;2. 验证 LVGL 底层驱动代码是否适配;3. 检查界面初始化代码是否在 main.c 中正确添加 |
1. 重新核对引脚定义并焊接 / 接线;2. 替换与 ESP32、LCD 匹配的 LVGL 底层驱动;3. 检查并补全界面初始化核心代码 |
硬件连接做好标记,驱动代码提前做好版本匹配验证,代码添加后逐行核对 |
|
3 |
GUI-Guider 移植后中文显示为乱码 / 方块 |
检查是否成功导入 simkai.ttf 字体文件;检查界面组件是否选择了导入的中文字体;检查字体文件是否被正确编译到工程中 |
1. 重新通过 GUI-Guider 的「工具 - 导入字体」添加 simkai.ttf;2. 选中界面文本组件,在属性区选择导入的中文字体;3. 确认 CMakeLists.txt 添加了 guider_customer_fonts 路径 |
导入字体后在 GUI-Guider 中验证模拟器中文显示,移植后确认字体文件被纳入编译 |
|
4 |
烧录时提示 Flash 分区错误 / 空间不足 |
检查 partitions.csv 的分区大小配置;检查 SDK 中是否正确选择了自定义分区表;检查 Flash 实际容量与配置的 Flash size 是否匹配 |
1. 调整 partitions.csv 中各分区的 Size 参数,为 app 和 vfs/fat 分区预留足够空间;2. 在 SDK 配置编辑器中「Partition Table」选择 Custom 并指定 partitions.csv;3. 配置 Flash size 为实际硬件的容量(如 16MB) |
根据工程大小合理分配分区空间,修改分区表后必须在 SDK 中生效配置 |
|
5 |
GUI-Guider 模拟器界面正常,ESP32 移植后组件显示错位 |
检查 GUI-Guider 的面板分辨率与 LCD 实际分辨率是否一致;检查 LVGL 的显示缩放配置是否正确 |
1. 重新在 GUI-Guider 中设置与 LCD 匹配的面板分辨率,重新生成代码并移植;2. 调整 LVGL 的显示缩放参数为 Auto Ratio/Custom Ratio 适配 LCD |
GUI-Guider 工程创建时提前确认 LCD 硬件分辨率,避免分辨率不匹配导致的显示错位 |
五、实训总结与ESP32开发心得
|
项目完成情况 |
ESP32开发重点收获 |
存在的不足 |
后续改进计划 |
|
成功完成 GUI-Guider 到 ESP32 的代码移植,实现了基于 LVGL 的图形化界面在 LCD 屏的正常显示,界面包含各类基础组件且中文显示正常,完成了机器人人机交互界面的基础开发 |
1. 掌握了 GUI-Guider 的工程创建、界面绘制和中文字体适配方法;2. 学会了 ESP-IDF 工程的 CMakeLists.txt 配置和 Flash 分区表配置;3. 理解了 LVGL 图形库在 ESP32 上的移植原理和底层驱动适配逻辑;4. 积累了 ESP32 外设(LCD)驱动和代码调试的实操经验 |
1. 对 LVGL 底层驱动的原理理解不够深入,无法独立修改驱动适配不同型号 LCD;2. 界面交互功能开发不足,仅实现了显示,未完成按钮点击等事件响应;3. 代码优化意识不足,移植后的代码存在冗余,未做精简 |
1. 深入学习 LVGL 底层驱动源码,尝试适配不同分辨率、接口的 LCD 显示屏;2. 学习 GUI-Guider 的事件配置和 ESP32 的中断处理,实现界面组件的交互功能(如按钮控制机器人运动);3. 对移植后的代码进行精简和优化,减少 Flash 和 RAM 占用;4. 尝试在界面中添加机器人传感器数据的实时显示,实现数据可视化与交互结合 |
六、代码附录

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 9
9 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)