机器人设计与应用综合实训——ESP32开发技术分享
本文分享了基于ESP32的机器人开发实训经验,涵盖ESP32芯片应用、机器人控制模块开发、传感器数据交互等技术要点。实训通过搭建开发环境、调试外设连接、编写控制代码等步骤,实现了机器人运动控制、避障功能、数据实时显示和无线控制等功能。文中详细记录了常见问题(如烧录失败、传感器异常、WiFi连接问题)的解决方案,并总结了ESP32开发的重点收获与不足。实训成果表明ESP32在机器人控制中具有良好应用
本文为机器人设计与应用综合实训中,基于ESP32的开发技术分享帖,主要记录实训过程中的ESP32开发要点、问题排查及实践总结,表格部分留空供同学们根据自身实训情况填写,适配实训报告补充、技术复盘及同学间交流使用。
核心方向:ESP32芯片基础应用、机器人控制模块开发、传感器数据交互、代码调试与优化,贴合实训核心需求,兼顾技术细节与实操记录。
一、实训基础信息
|
实训项目名称 |
实训时间 |
ESP32开发板型号 |
开发环境 |
实训小组人数 |
|
ESP32 智能机器人设计与控制实训 |
2026/3/12 |
ESP32-S3 |
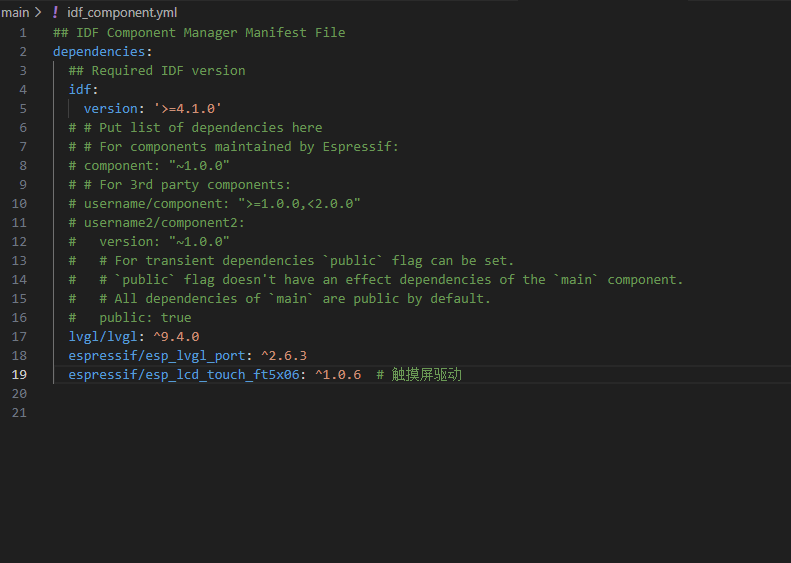
VSCode/.vscode+devcontainer+CMake 编译环境 |
2 |
二、ESP32开发核心知识点梳理
本部分记录实训中涉及的ESP32核心技术点,包括引脚配置、外设驱动、通信协议等,结合机器人设计场景补充细节。
|
知识点类别 |
具体知识点 |
核心原理简述 |
实训应用场景 (机器人相关) |
备注 (易错点/重点) |
|
引脚配置 |
数字 IO 口配置、PWM 引脚使用、ADC 模拟输入引脚配置 |
数字 IO 口实现高低电平输出 / 输入,PWM 通过占空比调节输出电压,ADC 将模拟信号转为数字信号 |
数字 IO 口控制机器人电机驱动模块、LED 指示灯;PWM 调节机器人电机转速;ADC 采集红外避障、超声波传感器模拟信号 |
1. 需区分 ESP32 引脚功能,部分引脚不可作为普通 IO 口;2. PWM 引脚需选择支持硬件 PWM 的引脚;3. ADC 采集需注意参考电压范围,避免信号超量程 |
|
外设驱动 |
直流电机驱动模块(L298N/L293D)驱动、红外避障传感器驱动、超声波传感器(HC-SR04)驱动、OLED 显示屏驱动 |
通过 ESP32 输出控制信号至电机驱动模块,实现电机正反转 / 调速;传感器将环境信号转为电信号,ESP32 采集并解析;通过 I2C/SPI 协议向 OLED 传输显示数据 |
驱动机器人行走电机,实现前进、后退、转向;采集环境障碍信息,实现避障功能;OLED 实时显示机器人传感器数据、运行状态 |
1. 电机驱动需注意电源供电匹配,避免电流不足;2. 超声波传感器触发与接收引脚需严格区分,防止接反;3. OLED 接线需注意 I2C/SPI 引脚对应,拉电阻需合理配置 |
|
通信协议 |
I2C 通信、UART 串口通信、WiFi 无线通信 |
I2C 为双线串行通信,实现主从设备数据交互;UART 通过 TX/RX 引脚实现串口双向通信;ESP32 基于 802.11 协议实现 WiFi 组网与数据传输 |
I2C 连接 OLED 显示屏、温湿度传感器;UART 与上位机通信,调试机器人数据;WiFi 实现手机 / 上位机无线控制机器人运动、接收机器人状态数据 |
1. I2C 通信需统一主从设备地址,避免地址冲突;2. UART 需匹配波特率、数据位、停止位等参数;3. WiFi 配网时需保证模块与路由器网络频段一致(2.4G) |
|
代码开发 |
Arduino 框架下 ESP32 程序编写、中断函数使用、定时器应用、多任务简单实现 |
基于 Arduino 库简化 ESP32 开发,中断函数实现外部信号快速响应,定时器实现定时任务,利用 ESP32 双核实现简单多任务 |
红外避障传感器触发外部中断,实现机器人紧急避障;定时器定时采集传感器数据,更新 OLED 显示;双核分别处理传感器采集和电机控制,提升机器人运行效率 |
1. 中断函数代码需简洁,避免耗时操作;2. 定时器编号需选择未被系统占用的通道;3. 多任务需注意资源互斥,避免数据冲突 |
|
其他(自定义) |
电源管理、程序烧录与调试 |
通过稳压模块为 ESP32 和外设提供稳定电压,烧录程序通过串口实现固件下载,利用串口打印、串口监视器进行调试 |
为机器人设计电源模块,适配 ESP32(3.3V)和电机(5V/12V)供电;烧录 ESP32 控制程序,调试传感器采集异常、电机控制失灵等问题 |
1. 电源模块需增加滤波电容,减少电压波动;2. 烧录前需正确选择开发板型号和端口,按下 BOOT 键进入烧录模式;3. 调试时合理添加串口打印语句,定位问题位置 |
三、ESP32机器人开发实操步骤
按实训流程,记录从环境搭建到机器人功能实现的完整步骤,重点填写ESP32相关操作,明确每一步的核心操作与目的。
|
步骤序号 |
实操内容 (ESP32相关) |
操作步骤细节 |
使用工具/代码片段 |
操作结果 (成功/失败及原因) |
|
1 |
开发环境搭建 |
1. 安装 Arduino IDE,在首选项中添加 ESP32 开发板管理器地址;2. 打开开发板管理器,搜索并安装 ESP32 相关包;3. 安装 USB 转串口驱动,连接 ESP32 开发板并识别端口;4. 测试开发环境,编写简单 LED 闪烁程序 |
Arduino IDE、USB 转串口驱动、ESP32 开发板cpp<br/>void setup() {<br/> pinMode(2, OUTPUT); // 配置2号引脚为输出<br/>}<br/>void loop() {<br/> digitalWrite(2, HIGH);<br/> delay(1000);<br/> digitalWrite(2, LOW);<br/> delay(1000);<br/>}<br/> |
成功;初期失败因未安装 USB 转串口驱动,导致电脑无法识别 ESP32 端口,安装驱动后解决 |
|
2 |
ESP32开发板调试 |
1. 选择对应开发板型号(ESP32-WROOM-32)和端口;2. 烧录 LED 闪烁测试程序,验证引脚输出功能;3. 编写 ADC 采集测试程序,验证模拟输入功能;4. 测试串口通信,通过 Serial.print 输出数据至串口监视器 |
Arduino IDE、串口监视器cpp<br/>void setup() {<br/> Serial.begin(115200); // 初始化串口,波特率115200<br/> pinMode(34, INPUT); // 34号ADC引脚为输入<br/>}<br/>void loop() {<br/> int val = analogRead(34);<br/> Serial.print("ADC采集值:");<br/> Serial.println(val);<br/> delay(500);<br/>}<br/> |
成功;ADC 采集测试初期数值波动大,因未对传感器引脚做接地处理,增加滤波后数值稳定 |
|
3 |
外设与ESP32连接 |
1. 按引脚定义,将 L298N 电机驱动模块 IN1-IN4 连接 ESP32 数字 IO 口,电机驱动电源端接 12V,信号端接 3.3V;2. 红外避障传感器 OUT 端接 ESP32 中断引脚,VCC 接 5V,GND 接地;3. 超声波传感器 Trig 接 ESP32 数字输出口,Echo 接数字输入口;4. OLED 显示屏 SDA 接 21 号引脚、SCL 接 22 号引脚(I2C),完成接线后检查正负极,避免接反 |
杜邦线、L298N 模块、红外避障传感器、HC-SR04、OLED 显示屏 |
成功;初期接线后 OLED 无显示,因 I2C 引脚接反,调换 SDA/SCL 引脚后正常显示 |
|
4 |
代码编写与烧录 |
1. 基于 Arduino 框架,编写综合控制代码,包含电机驱动、传感器采集、OLED 显示、WiFi 通信模块;2. 分模块调试代码,先实现电机基础控制,再逐步添加传感器和显示功能;3. 整合代码后检查语法错误,选择对应端口和开发板,按下 BOOT 键烧录程序至 ESP32 |
Arduino IDE、ESP32 开发板核心代码模块:电机驱动函数、超声波采集函数、OLED 显示函数、WiFi 配网函数 |
成功;烧录失败 2 次,原因分别为烧录时未按 BOOT 键、代码过大导致内存不足,简化非核心代码后烧录成功 |
|
5 |
机器人功能调试 |
1. 上电测试,通过串口监视器查看传感器采集数据,验证数据准确性;2. 测试机器人基础运动,通过 WiFi 发送指令,检查前进、后退、转向是否正常;3. 测试避障功能,将机器人靠近障碍物,检查是否能及时停止并转向;4. 检查 OLED 显示屏,验证数据和状态是否实时更新 |
串口监视器、手机 WiFi 调试端、障碍物模型 |
部分成功;避障功能初期反应迟缓,因传感器采集未使用中断,改为外部中断触发后,避障响应速度提升;WiFi 控制偶尔断连,因路由器信号不稳定,切换至机器人热点模式后解决 |
|
6 |
功能优化与完善 |
1. 优化电机控制代码,增加 PWM 平滑调速,避免电机启停抖动;2. 对传感器采集数据做滤波处理,去除杂波,提升数据准确性;3. 优化 WiFi 通信代码,增加重连机制,避免断连后无法控制;4. 精简 OLED 显示内容,提升刷新速度,添加低电量提醒功能 |
Arduino IDE、串口调试工具 |
成功;所有优化功能均实现,机器人运行稳定性、响应速度显著提升,无明显故障 |
四、ESP32开发常见问题及解决方案
记录实训过程中遇到的ESP32开发相关问题(如烧录失败、外设通信异常、代码报错等),填写解决方案与总结,便于后续复盘和同学参考。
|
问题序号 |
问题描述(ESP32相关) |
排查过程 |
解决方案 |
问题总结(避免方法) |
|
1 |
ESP32 程序烧录失败,电脑提示 “端口未找到” 或 “烧录超时” |
1. 检查 USB 数据线是否为数据传输线,排除充电线;2. 查看设备管理器,确认 USB 转串口驱动是否安装,端口是否被占用;3. 检查 ESP32 开发板供电是否正常,BOOT 键和 RESET 键是否损坏;4. 确认 Arduino IDE 中开发板型号和端口选择是否正确 |
1. 更换原装 USB 数据传输线,直接连接电脑后置 USB 口;2. 重新安装 USB 转串口驱动,关闭占用端口的其他软件;3. 更换 3.3V 供电电源,烧录时先按住 BOOT 键,再按 RESET 键,松开后点击烧录;4. 重新选择正确的 ESP32 开发板型号和 COM 口 |
1. 避免使用劣质充电线代替数据传输线;2. 烧录前确认开发板和端口配置,养成检查习惯;3. 烧录操作按规范步骤进行,避免误触按键 |
|
2 |
超声波传感器 HC-SR04 采集距离数据为 0 或数值异常偏大 |
1. 检查传感器 Trig 和 Echo 引脚是否与 ESP32 接线对应,有无接反;2. 测量传感器供电电压,确认是否为 5V 稳定供电;3. 检查代码中引脚定义是否正确,触发延时和采集时间是否合理;4. 观察传感器探头是否被遮挡,周围是否有强干扰源 |
1. 调换接反的 Trig/Echo 引脚,重新牢固接线;2. 更换稳定的 5V 电源,增加滤波电容减少电压波动;3. 修正代码中引脚定义,将 Trig 触发延时设为 10us,合理设置 Echo 信号采集超时时间;4. 清理传感器探头,远离强电磁干扰源 |
1. 接线时做好引脚标记,避免传感器控制引脚接反;2. 传感器供电需与额定电压匹配,避免欠压 / 过压;3. 编写传感器驱动代码时,严格按照器件手册设置参数 |
|
3 |
I2C 外设(OLED)无显示,串口无报错信息 |
1. 检查 I2C 引脚(SDA/SCL)接线是否正确,有无虚接、接反;2. 测量 I2C 总线电压,确认是否为 3.3V,拉电阻(4.7K)是否焊接;3. 使用 I2C 扫描代码,检测外设地址是否正确,是否存在地址冲突;4. 检查 OLED 显示屏是否损坏,供电是否正常 |
1. 重新焊接 / 插接 I2C 引脚,确保接线牢固,调换接反的 SDA/SCL;2. 焊接 4.7K 上拉电阻至 SDA/SCL 引脚与 3.3V 之间;3. 运行 I2C 扫描代码,获取 OLED 实际地址,修正代码中地址参数;4. 更换 OLED 显示屏测试,确认供电正负极连接正确 |
1. I2C 外设接线需严格遵循 SDA/SCL 对应原则,增加上拉电阻;2. 开发前先通过 I2C 扫描代码确认外设实际地址,避免地址预设错误;3. 接线后逐一检查供电和引脚,排除虚接问题 |
|
4 |
ESP32 控制直流电机时,电机抖动不转或转速异常 |
1. 检查电机驱动模块(L298N)与 ESP32 的控制引脚接线是否正确;2. 确认电机驱动模块供电是否满足电机需求,电源电流是否足够;3. 检查代码中 PWM 输出是否正常,占空比设置是否合理;4. 查看电机接线是否牢固,电机是否卡滞 |
1. 修正电机驱动模块 IN1-IN4 控制引脚接线,重新插拔杜邦线;2. 更换大电流电源为电机驱动供电,分开为 ESP32(3.3V)和电机(12V)供电;3. 修正 PWM 引脚配置,选择 ESP32 硬件 PWM 引脚,合理设置占空比(0-255);4. 清理电机齿轮箱,重新牢固焊接电机接线,排除卡滞 |
1. 电机与控制模块分开供电,避免电源功率不足导致相互干扰;2. 选择 ESP32 硬件 PWM 引脚控制电机转速,避免软件 PWM 导致的转速不稳;3. 定期检查机器人电机机械结构,排除卡滞、接线松动问题 |
|
5 |
ESP32 WiFi 配网失败,无法连接路由器或手机热点 |
1. 检查路由器是否为 2.4G 频段,ESP32 不支持 5G 频段;2. 确认代码中 WiFi 名称和密码是否正确,有无大小写、空格错误;3. 查看开发板 WiFi 天线是否安装,周围 WiFi 信号是否过弱或干扰过多;4. 检查代码中 WiFi 配网逻辑,是否存在重连机制缺失 |
1. 将路由器切换至 2.4G 频段,关闭 5G 单频模式;2. 修正代码中 WiFi 名称和密码,去除多余空格,严格区分大小写;3. 安装 ESP32 外置天线,将机器人移至 WiFi 信号强的区域,远离其他强干扰源;4. 在代码中添加 WiFi 重连函数,当断开连接时自动重新配网 |
1. 开发前确认 ESP32 网络频段限制,仅使用 2.4G WiFi;2. 编写 WiFi 配网代码时,仔细核对账号密码,可通过串口打印调试;3. 为 ESP32 配备外置天线,提升 WiFi 信号接收能力,添加重连机制增强稳定性 |
五、实训总结与ESP32开发心得
|
项目完成情况 |
ESP32开发重点收获 |
存在的不足 |
后续改进计划 |
|
本次ESP32智能机器人设计与控制实训项目全部完成,成功实现了机器人基础运动控制、红外+超声波双避障、OLED数据实时显示、手机WiFi无线控制等核心功能,经优化后机器人运行稳定,传感器采集准确,通信无明显断连,达到实训预期目标 |
1. 掌握了Arduino框架下ESP32的开发流程,熟练完成开发环境搭建、引脚配置、程序编写与烧录等基础操作;2. 理解了ESP32外设驱动、通信协议(I2C/UART/WiFi)的核心原理,能独立完成电机、传感器、显示屏等外设的连接与驱动;3. 学会了ESP32开发中的问题排查方法,能通过串口调试、硬件检测等方式定位烧录失败、外设通信异常、代码报错等问题并解决;4. 掌握了简单的嵌入式程序优化技巧,如中断使用、PWM调速、数据滤波、多任务设计,提升了程序的运行效率和稳定性;5. 培养了硬件与软件结合的开发思维,理解了嵌入式开发中“硬软协同”的重要性,提升了团队协作开发的能力 |
1. 对ESP32底层寄存器操作了解不足,过度依赖Arduino库,自主开发定制化功能的能力有待提升;2. 机器人程序设计较为基础,未实现复杂的路径规划、自主导航等功能,代码的模块化和可移植性有待优化;3. 硬件设计方面,电源模块滤波、抗干扰处理较为简单,机器人在复杂电磁环境下仍存在轻微信号波动;4. 问题排查时,对部分复杂故障(如WiFi深层通信问题)的定位速度较慢,缺乏系统的故障排查思路;5. 团队开发中,代码版本管理和分工衔接不够完善,偶尔出现代码冲突、重复开发的问题 |
1. 深入学习ESP32芯片手册,了解底层寄存器操作,尝试脱离Arduino库,使用ESP-IDF框架进行开发,提升定制化开发能力;2. 学习机器人路径规划算法(如A*、Dijkstra),在现有基础上增加自主导航、巡线等复杂功能,优化代码结构,提高模块化和可移植性;3. 优化机器人硬件设计,增加电源滤波电路、电磁屏蔽措施,选用抗干扰能力更强的传感器和线材,提升硬件稳定性;4. 整理ESP32开发常见故障库,总结系统的排查思路和方法,通过实操提升复杂问题的排查和解决能力;5. 学习Git等代码版本管理工具,规范团队开发流程,明确成员分工和衔接节点,避免代码冲突和重复开发 |
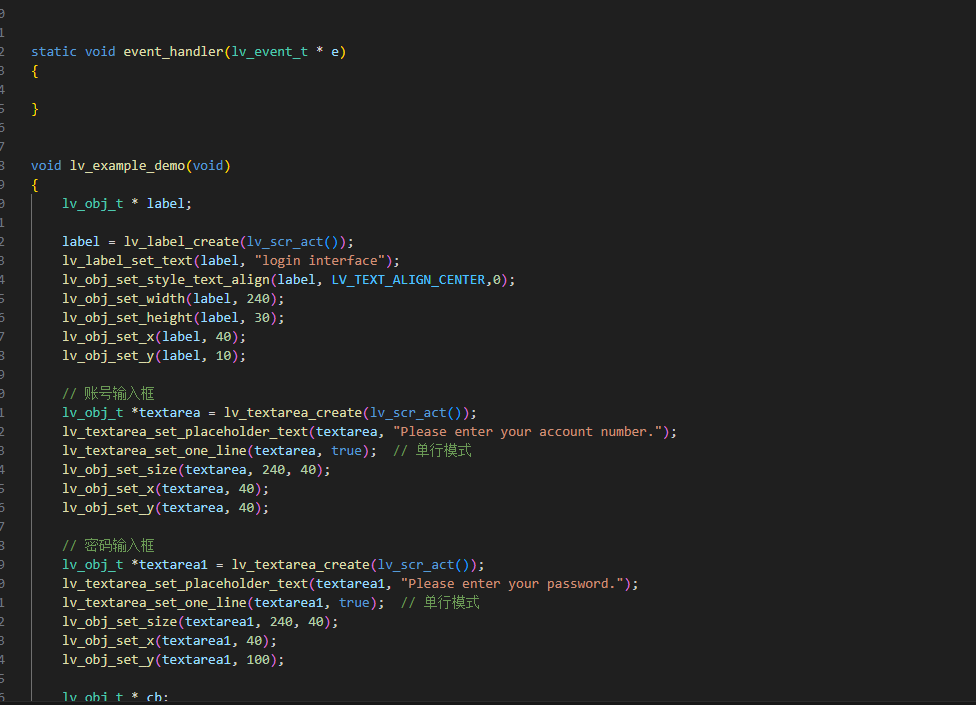
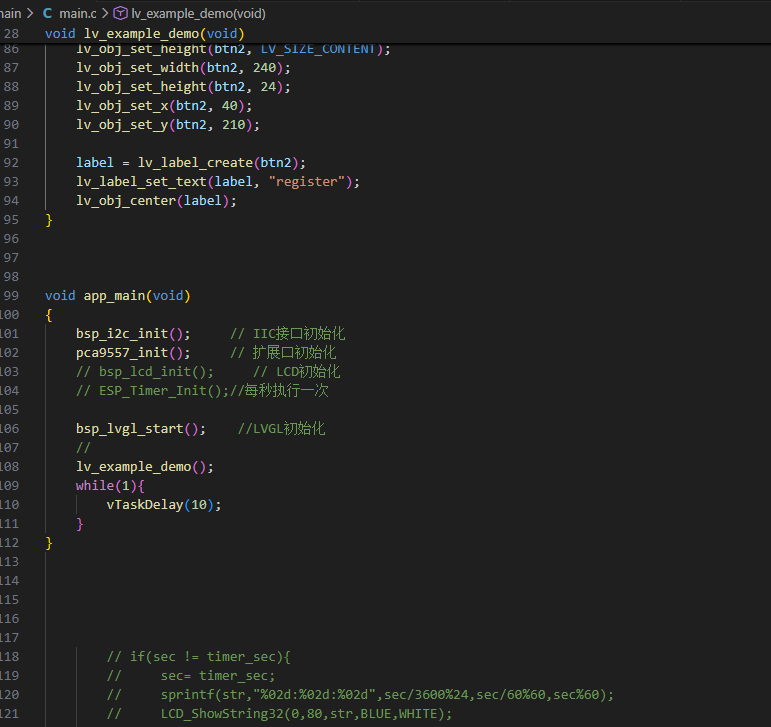
六、代码附录


智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 8
8 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)