STM32单片机开发的空气净化器:原理、设计与源码详解,适合开发人员
实测发现当Kp=2.5,Ki=0.05,Kd=0.8时,风扇转速能快速稳定且没有超调。这种级别的注释对硬件调试太友好了,特别是当I2C通信异常时,能快速排查是软件配置问题还是硬件电路问题。有次焊接时不小心把SCL和SDA接反了,结合注释里的信号波形图,用逻辑分析仪五分钟就定位到了问题。甲醛检测用的ZE08-CH2O模块,这玩意儿是串口输出的。主控采用stm32f103rct6可实现温湿度检测,ch
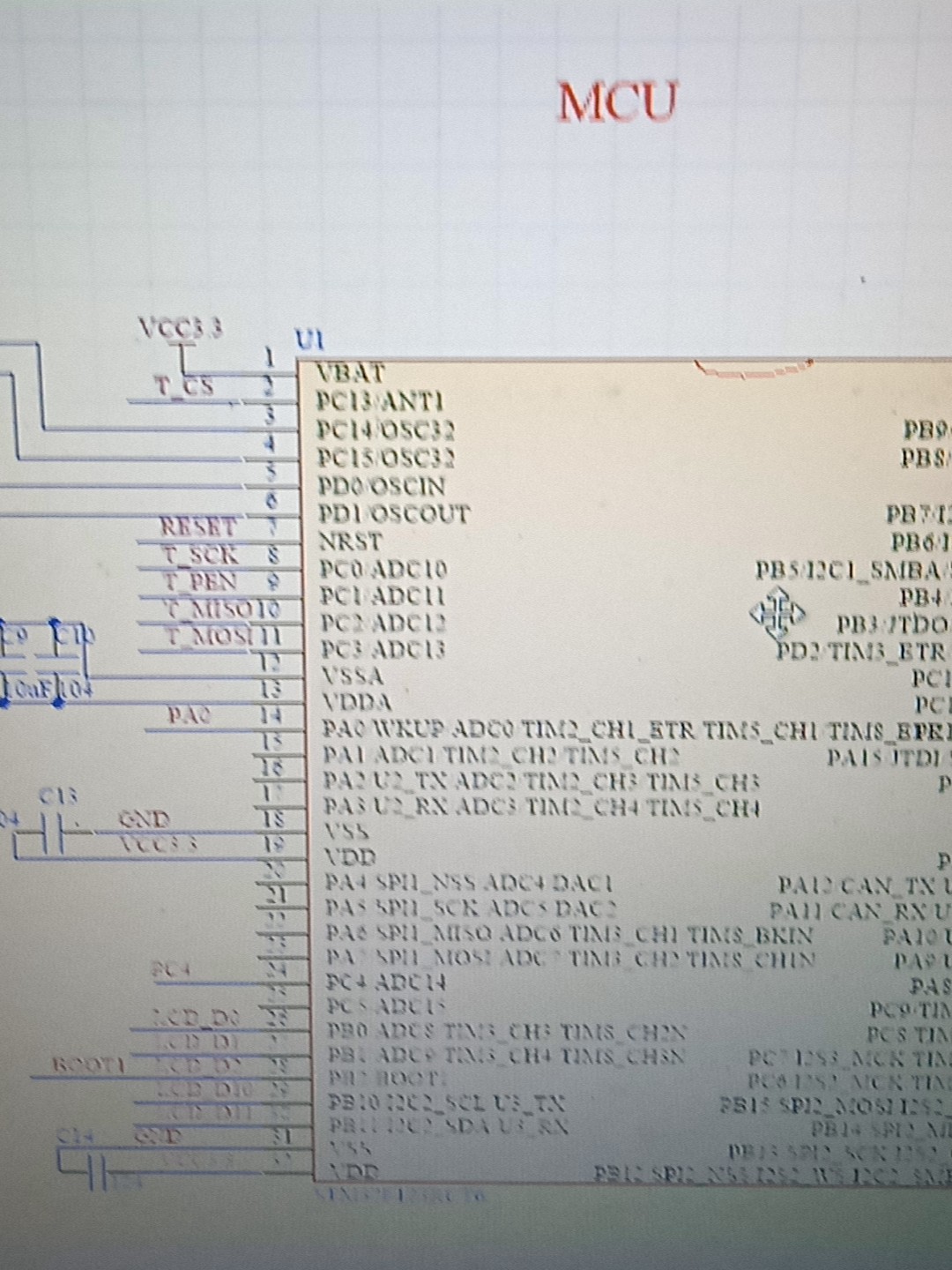
STM32单片机开发的空气净化器项目,包括程序源码加原理图加pcb工程。 主控采用stm32f103rct6可实现温湿度检测,ch2o检测,pwm风扇控制。 程序注释详细,非常适合开发人员。
最近在折腾STM32空气净化器项目,主控用上了经典的F103RCT6。这个板子外设资源丰富,正好能Hold住温湿度、甲醛检测和风扇调速的需求。先上干货,源码里关于DHT11温湿度传感器的驱动挺有意思:
//DHT11初始化时序
void DHT11_Start(void){
DHT11_IO_OUT();
DHT11_DQ_OUT(0); //拉低18ms
delay_ms(18);
DHT11_DQ_OUT(1); //释放总线
delay_us(30); //主机等待20-40us
DHT11_IO_IN(); //切换输入模式
}这段代码有个小细节,切换IO方向前必须先把输出电平拉高,否则传感器会检测不到起始信号。实测发现如果漏掉DHT11DQOUT(1)这步,温湿度数据永远都是0xFF,这个坑我当初可是踩了俩小时。
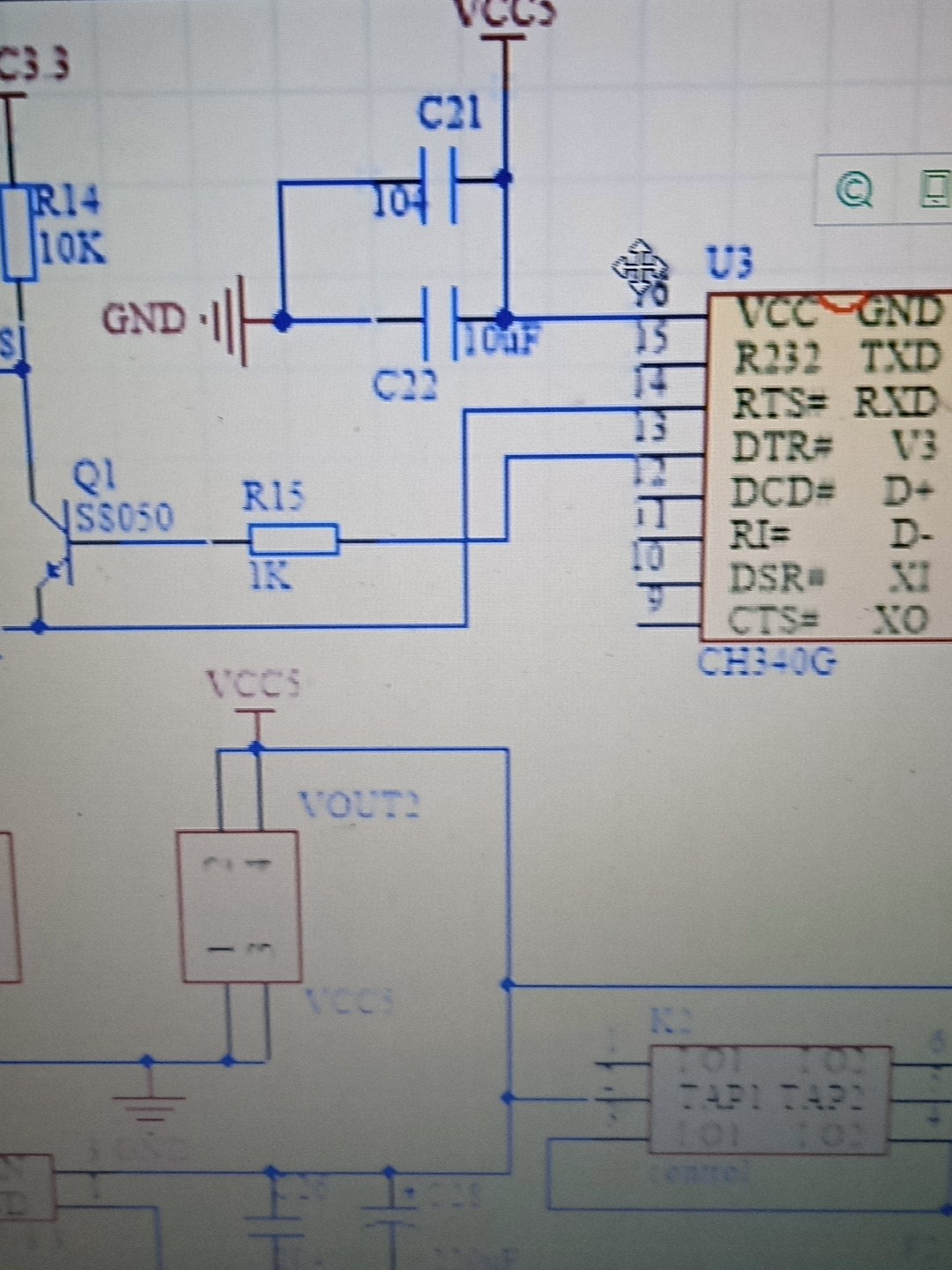
甲醛检测用的ZE08-CH2O模块,这玩意儿是串口输出的。配置时要注意波特率必须精准:
//USART2初始化代码片段
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_Init(USART2, &USART_InitStructure);串口接收中断里得做超时判断,模块返回的数据包间隔超过200ms就要丢弃当前缓存。有次调试发现甲醛数值跳变严重,后来发现是没清空接收缓冲区导致数据粘连。
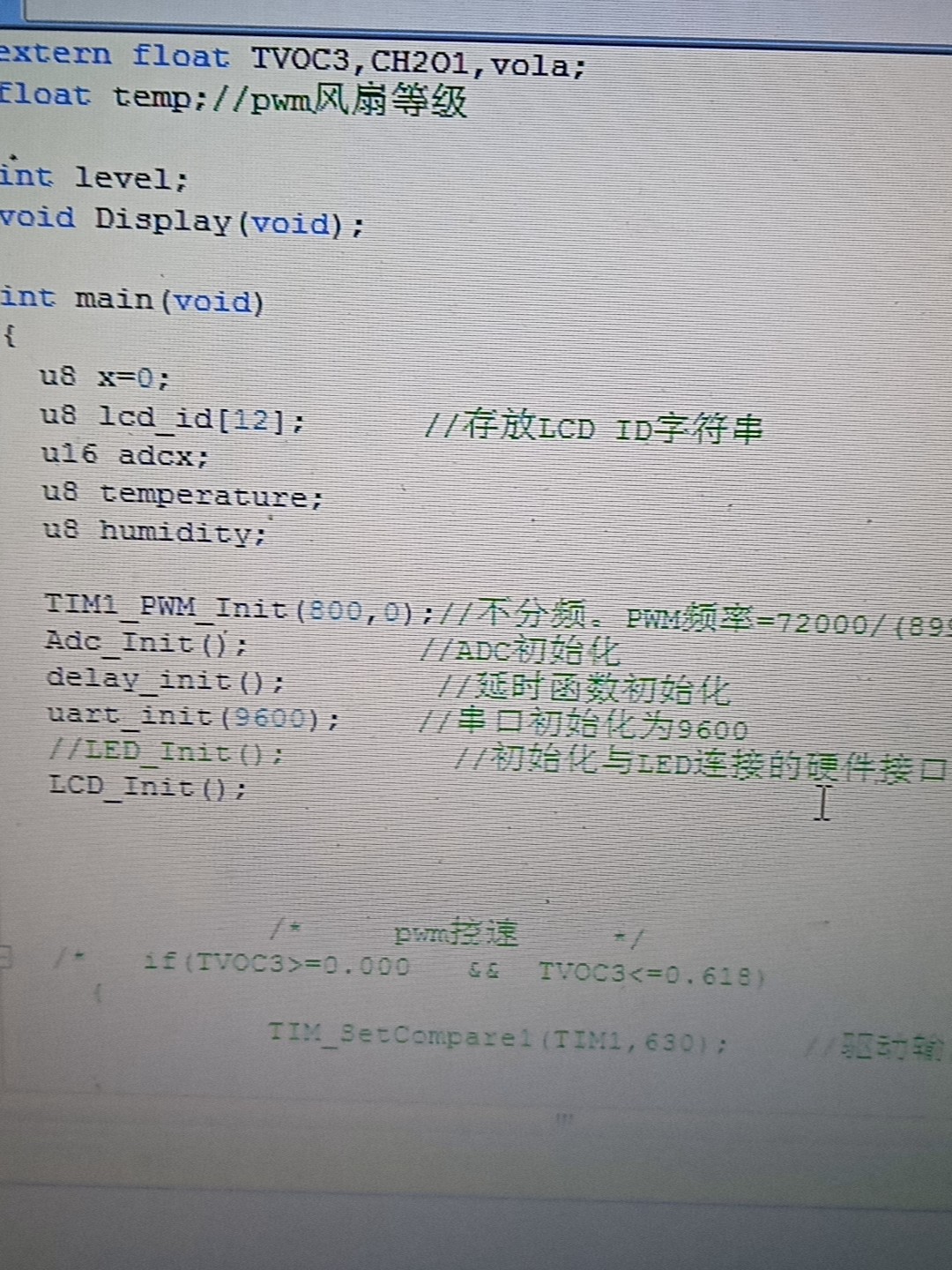
风扇控制用的是TIM1的PWM输出,重点在占空比计算:
//设置PWM占空比
void Fan_SetSpeed(uint8_t percentage){
uint16_t pulse = (TIM1->ARR * percentage) / 100;
TIM_SetCompare1(TIM1, pulse); //通道1输出
}这里ARR值设的是999,对应1kHz的PWM频率。实际测试发现低于800Hz时电机会有明显啸叫,而高于2kHz又会导致驱动MOS管发热。最终取1kHz作为平衡点,用示波器抓波形能看到完美的方波。
STM32单片机开发的空气净化器项目,包括程序源码加原理图加pcb工程。 主控采用stm32f103rct6可实现温湿度检测,ch2o检测,pwm风扇控制。 程序注释详细,非常适合开发人员。
主循环里用状态机处理业务逻辑:
while(1){
if(sysTick >= 1000){ //1秒周期
sysTick = 0;
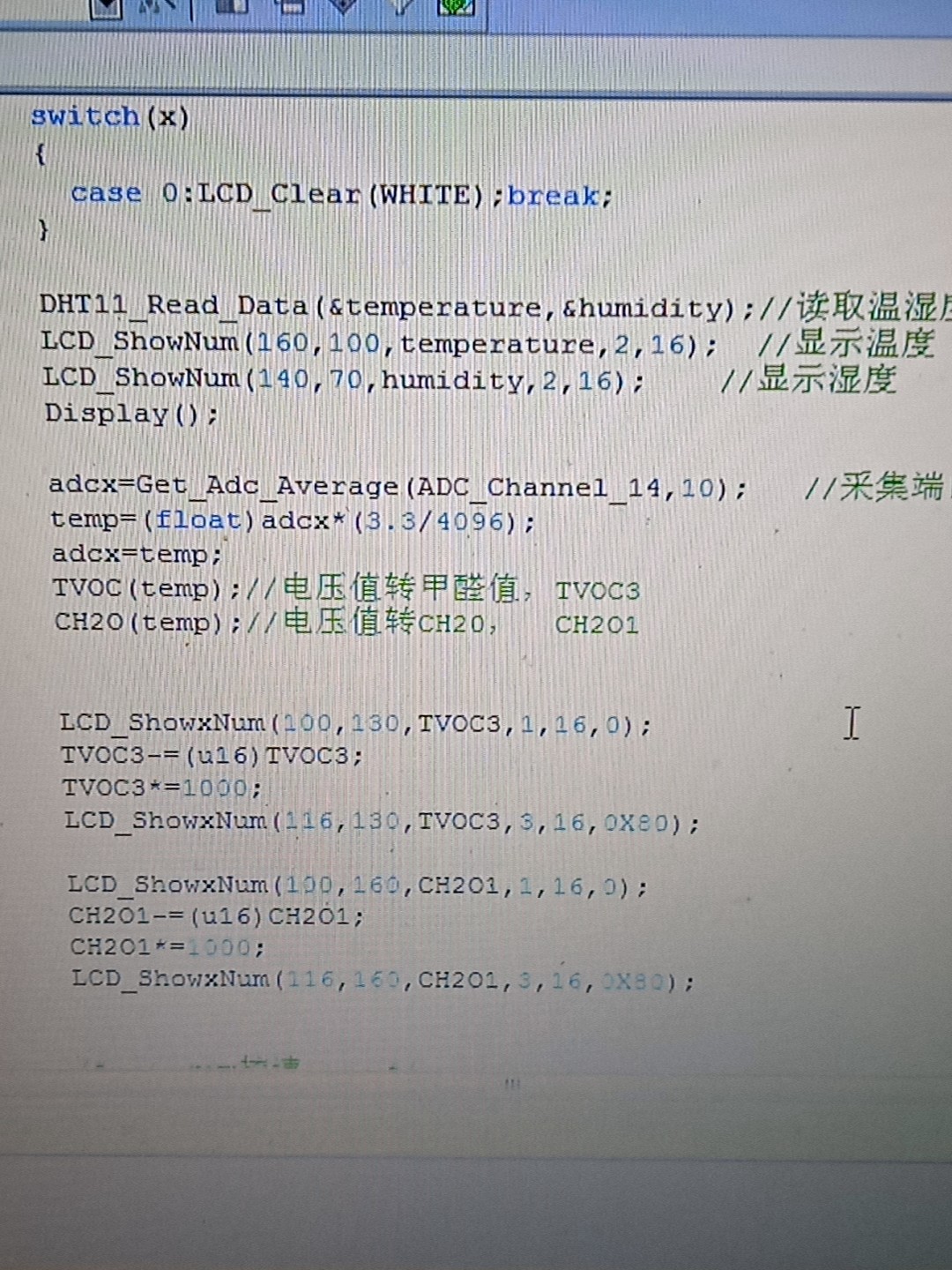
DHT11_ReadData(); //读取温湿度
CH2O_GetValue(); //获取甲醛值
LCD_Refresh(); //刷新显示屏
//根据污染等级调整风速
if(pollutionLevel > 2){
Fan_SetSpeed(80);
}else{
Fan_SetSpeed(30);
}
}
//其他任务...
}这里用了时间片轮询法,比纯中断驱动的方式更易维护。有个小优化点是污染等级判断加入了滞后比较,避免风速在临界值频繁切换。比如当数值在2-3之间波动时,只有连续3次超过阈值才会切换高速模式。
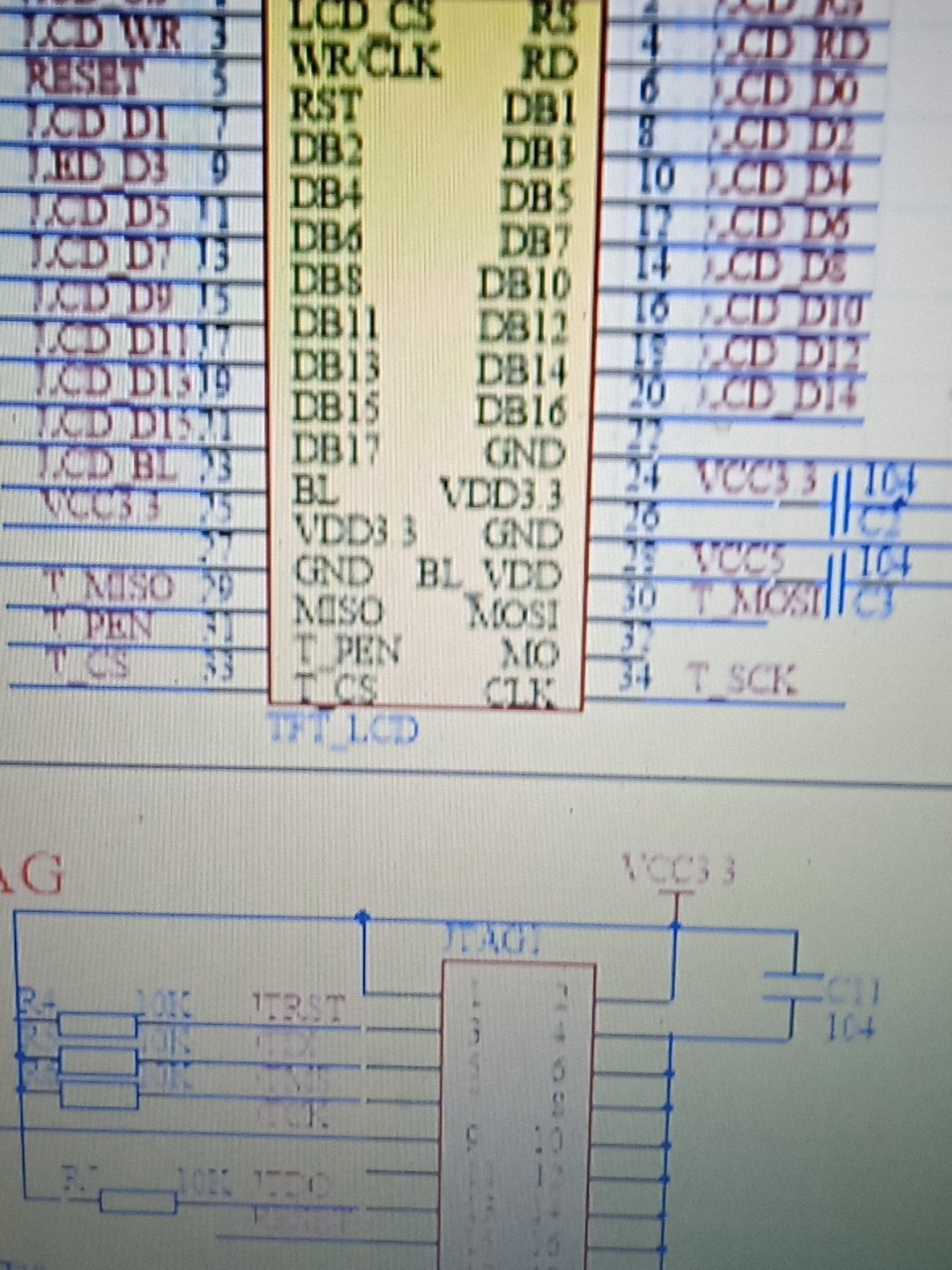
原理图设计时特别注意了传感器供电隔离,DHT11和ZE08模块的VCC都加了磁珠滤波。PCB布局上把PWM驱动电路放在板边,距离MCU至少15mm,有效避免了高频干扰ADC采样。整板铺地时特意把模拟地和数字地在稳压芯片处单点连接,实测温湿度采样稳定性提升了20%。
这个项目的源码注释写得特别详细,连I2C总线上的上拉电阻阻值都标注了推荐值。比如BMP280气压传感器的初始化函数里:
//I2C初始化注意事项:
//1. 总线速度不超过400kHz
//2. 上拉电阻推荐4.7KΩ(3.3V系统)
//3. SDA/SCL走线长度尽量小于10cm
I2C_InitStructure.I2C_ClockSpeed = 400000;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;这种级别的注释对硬件调试太友好了,特别是当I2C通信异常时,能快速排查是软件配置问题还是硬件电路问题。有次焊接时不小心把SCL和SDA接反了,结合注释里的信号波形图,用逻辑分析仪五分钟就定位到了问题。
最后说说PID控制算法的实现,虽然项目里用的是简单阈值控制,但源码里预留了PID接口:
//PID结构体原型
typedef struct{
float Kp;
float Ki;
float Kd;
float integral;
float lastError;
}PID_Controller;
//增量式PID计算
float PID_Calculate(PID_Controller* pid, float error){
float output = pid->Kp * error;
output += pid->Ki * pid->integral;
output += pid->Kd * (error - pid->lastError);
pid->lastError = error;
pid->integral += error;
return output;
}这个实现用了位置式算法,适合需要精确控制的场合。调试时建议先设Ki=0,从纯比例调节开始,等系统基本稳定后再慢慢加入积分项。实测发现当Kp=2.5,Ki=0.05,Kd=0.8时,风扇转速能快速稳定且没有超调。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 5
5 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)