51单片机正反转可控的直流电机设计 C程序、proteus仿真、报告! 支持按键设置直流电机的...
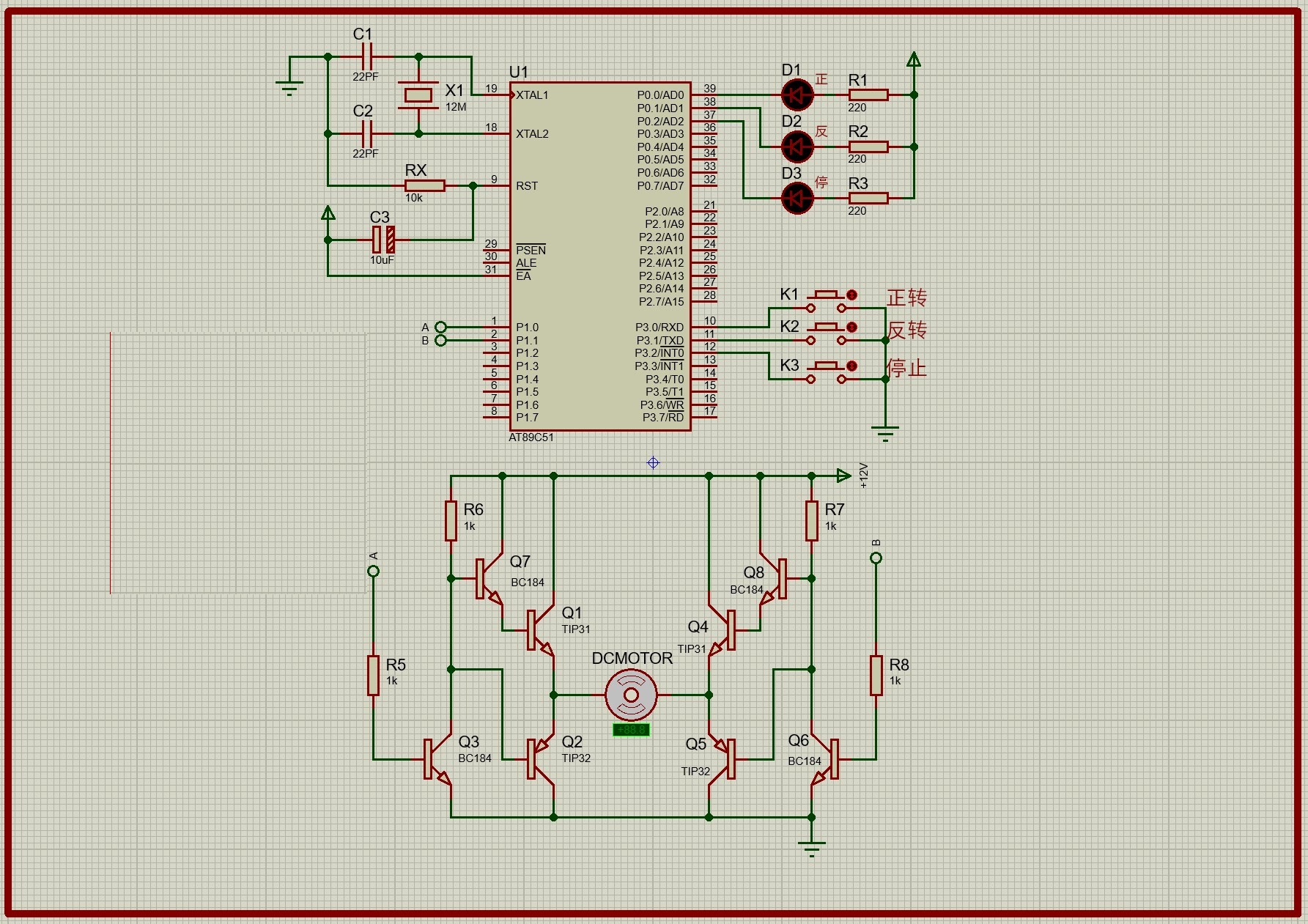
先上硬件框图:STC89C52芯片做主控,L293D电机驱动模块负责功率放大,三个轻触按键接在P3.2-P3.4,电机接在L293D的输出端。Proteus仿真有个小技巧:在L293D的VSS(逻辑电源)和VS(电机电源)之间记得接个10uF的电容,否则仿真时可能出现驱动芯片逻辑紊乱。这个暑假折腾了个好玩的——用51单片机做个能正反转带急停的直流电机控制器。别看功能简单,里面按键消抖、PWM调速、
51单片机正反转可控的直流电机设计 C程序、proteus仿真、报告! 支持按键设置直流电机的正转、反转、急停。
这个暑假折腾了个好玩的——用51单片机做个能正反转带急停的直流电机控制器。别看功能简单,里面按键消抖、PWM调速、电机驱动这些坑一个没少踩,现在把核心代码和仿真模型整理出来,给想入门的兄弟参考参考。
先上硬件框图:STC89C52芯片做主控,L293D电机驱动模块负责功率放大,三个轻触按键接在P3.2-P3.4,电机接在L293D的输出端。Proteus里连线时注意给电机两端反向并联个1N4007续流二极管,不然关断瞬间的反向电动势可能烧管子。
核心控制代码其实就两大块——按键扫描和电机驱动。先看按键处理部分:
sbit MOTOR_A = P1^0; // 电机控制端A
sbit MOTOR_B = P1^1; // 电机控制端B
void Key_Scan(){
static uint8_t key_up = 1;
if((KEY_FORWARD==0 || KEY_REVERSE==0 || KEY_STOP==0) && key_up){
DelayMs(10); // 消抖延时
key_up = 0;
if(KEY_FORWARD == 0) Motor_Ctrl(FORWARD);
else if(KEY_REVERSE == 0) Motor_Ctrl(REVERSE);
else if(KEY_STOP == 0) Motor_Ctrl(STOP);
}else if(KEY_FORWARD && KEY_REVERSE && KEY_STOP){
key_up = 1;
}
}这个状态机结构的按键扫描比直接if判断可靠得多。注意static变量key_up用来记录按键释放状态,配合10ms延时消抖,实测在proteus里能稳定识别动作。遇到按键失灵别急着怀疑硬件,先检查引脚定义有没有和仿真图对应上。
电机驱动函数才是重头戏,L293D的逻辑控制其实很简单:
void Motor_Ctrl(uint8_t mode){
switch(mode){
case FORWARD:
MOTOR_A = 1;
MOTOR_B = 0; // 正转
break;
case REVERSE:
MOTOR_A = 0;
MOTOR_B = 1; // 反转
break;
default:
MOTOR_A = 0; // 急停
MOTOR_B = 0;
}
// 启动PWM调速
PWM_Init();
}重点在于正反转时A、B两个控制端的电平组合。有个坑要注意——急停时如果直接断开使能端,电机可能因为惯性继续转动,所以这里采用短路制动(两个输出端同时置低),实测制动效果明显比单纯断电好。
51单片机正反转可控的直流电机设计 C程序、proteus仿真、报告! 支持按键设置直流电机的正转、反转、急停。
PWM调速用的是定时器0中断实现占空比调节:
void Timer0_Init(){
TMOD |= 0x01; // 16位定时器模式
TH0 = 0xFC; // 1ms定时
TL0 = 0x18;
ET0 = 1;
EA = 1;
TR0 = 1;
}
void Timer0_ISR() interrupt 1{
static uint8_t pwm_count = 0;
pwm_count++;
if(pwm_count >= 100) pwm_count = 0;
if(pwm_count < duty){ // duty是占空比变量
ENA = 1; // 使能端
}else{
ENA = 0;
}
// 重装初值
TH0 = 0xFC;
TL0 = 0x18;
}这里把PWM周期设为100级可调,通过修改duty变量(0-100)就能改变转速。调试时发现电机启动瞬间电流很大,后来在程序初始化时加了软启动——让占空比从30%逐渐增加到设定值,解决了电机抖动问题。
Proteus仿真有个小技巧:在L293D的VSS(逻辑电源)和VS(电机电源)之间记得接个10uF的电容,否则仿真时可能出现驱动芯片逻辑紊乱。仿真效果和实物基本一致,急停时电机大约0.5秒内就能完全停止。
最后说下硬件保护:实际做实物时一定要在单片机IO口和L293D之间加光耦隔离,我在实验室烧过两个芯片才明白这个道理。另外程序里可以加个堵转检测,当电流持续超过阈值时自动急停,这个功能正在完善中。
完整代码和仿真文件已上传Github,需要报告模板的兄弟可以私信。下期准备做无线遥控版本,打算用NRF24L01实现,有兴趣的可以持续关注。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 6
6 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)