ESP32-S3 机器人实训:LCD 显示屏全攻略ESP32-S3机器人实训实战:LCD显示屏从底层驱动到动态交互全攻略
本文围绕ESP32-S3+ST7789 LCD屏,结合机器人实训场景,完整拆解LCD开发全流程。从硬件选型、VSCode+ESP-IDF5.4环境搭建、外部PSRAM配置等前置准备,到I2C+PCA9557、SPI+ST7789核心驱动移植,再到图片、字符、汉字及动态GIF显示功能实现,兼顾实操性与工程规范性。同时梳理实训高频问题及解决方案,提供可直接复用的实战代码,助力新手快速上手,培养嵌入式工
导读:LCD显示屏是机器人实现状态可视化、人机交互的核心外设,也是嵌入式开发从“硬件操作”迈向“工程化开发”的关键分水岭。本文以ESP32-S3+ST7789 LCD屏为核心,结合机器人设计综合实训场景,从硬件选型、环境搭建、内存管理、驱动移植到动态交互实现,完整拆解LCD开发全流程,既保留可直接复用的实战代码,又解析实训中高频踩坑的底层逻辑,兼顾新手入门的实操性与工程开发的规范性,是机器人实训、课程设计的一站式指南。
一、实训背景:为什么LCD是机器人开发的“核心练手项”?
在机器人设计实训中,LCD驱动开发绝非简单的“点亮屏幕”,而是涵盖多维度核心能力的综合训练:
硬件层:SPI高速总线、I2C扩展总线、PWM背光控制的协同运用;
资源层:外部PSRAM配置与内存管理,解决嵌入式开发“内存不足”的核心痛点;
软件层:ESP-IDF组件化开发思想,从“碎片化代码”到“工程化架构”的思维转变;
交互层:字符/汉字/图片/动态GIF的渲染逻辑,为机器人HMI(人机交互)打下基础。
本文适配ESP32-S3开发板+ESP-IDF5.4+VSCode环境,所有代码均经过实训验证,零基础也能快速上手。
二、开发前置:硬件选型与环境搭建的“关键细节”
2.1 核心硬件清单(实训推荐配置)
|
硬件模块 |
选型/参数 |
核心作用 |
|
主控芯片 |
ESP32-S3-WROOM-1 |
原生USB、Octal SPI接口,支持外部PSRAM |
|
LCD屏幕 |
ST7789(320×240)2.4英寸TFT屏 |
机器人状态显示核心外设 |
|
IO扩展芯片 |
PCA9557 |
扩展GPIO,控制LCD的CS/PA_EN引脚 |
|
外部存储 |
8MB Quad/Octal PSRAM |
解决图片/动画显示的内存不足问题 |
|
通信总线 |
SPI(40MHz)、I2C(400kHz)、PWM |
SPI驱动LCD、I2C驱动扩展芯片、PWM调背光 |
2.2 环境搭建:从“能用”到“规范”
推荐使用VSCode+ESP-IDF5.4插件,避免手动配置环境变量的繁琐,核心步骤:
- 安装ESP-IDF插件后,通过ESP-IDF: Configure ESP-IDF Extension配置工具链路径;
- 复制已调试的USART工程,重命名为03-ESP-One-LCD,验证工程基础配置:
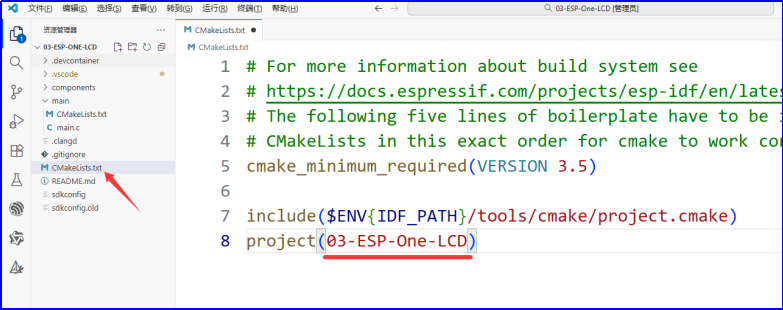
编译工程,无报错则完成基础环境搭建。
2.3 必做配置:开启外部PSRAM(实训最高频坑点)
320×240的16位真彩色图片需占用约150KB内存,ESP32-S3片内内存不足以支撑,必须开启PSRAM:
- 在VSCode中打开SDK配置编辑器(menuconfig),搜索PSRAM;
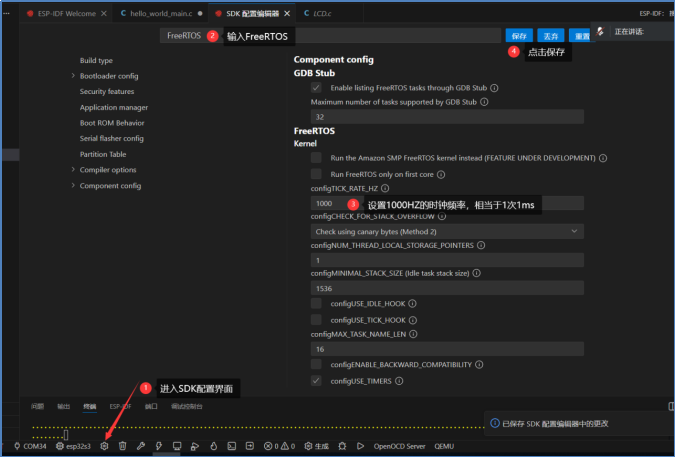
勾选Support for external, SPI-connected RAM,选择Quad Mode PSRAM;
勾选Initialize SPI RAM during startup,保存后重新编译;
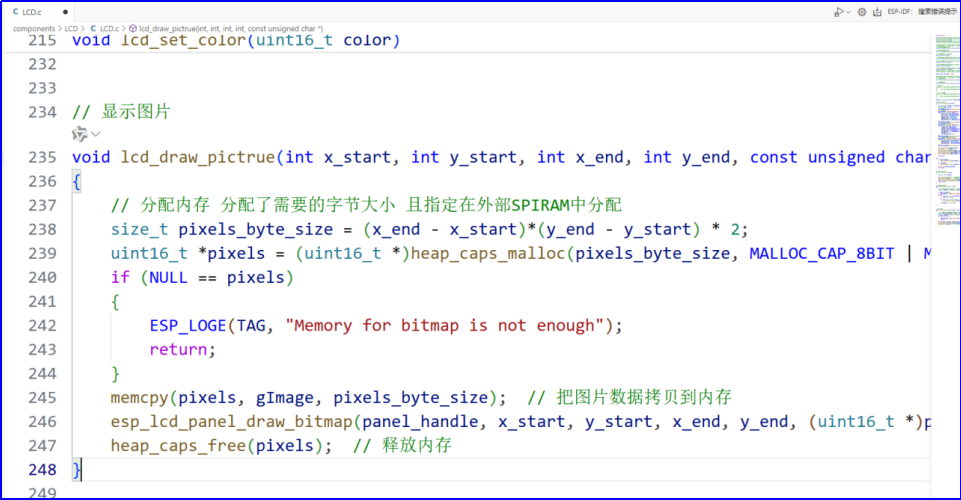
关键提醒:内存分配时需指定MALLOC_CAP_SPIRAM,避免分配到片内内存:
三、核心驱动移植:组件化开发的“优雅实现”
ESP-IDF的核心优势是组件化复用,将LCD驱动封装为独立组件,便于后续复用和维护。
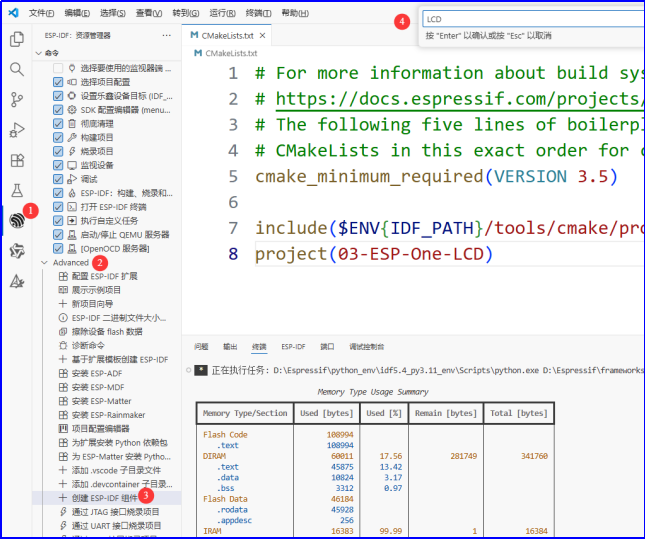
3.1 新建LCD组件,配置编译规则
- 在工程components目录下新建LCD文件夹,创建include(头文件)和src(源文件)子目录;
- 编写LCD/CMakeLists.txt,声明依赖组件和文件路径:
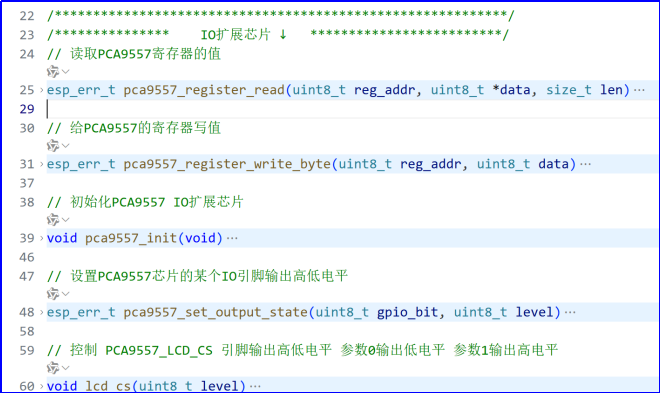
3.2 硬件通信层:I2C+PCA9557驱动
PCA9557通过I2C与ESP32通信,负责LCD的片选、使能等引脚控制,核心初始化代码:
3.3 LCD屏驱动:SPI+ST7789初始化
利用ESP-IDF官方esp_lcd库封装的ST7789驱动,避免手写底层时序,核心代码:
|
C // LCD屏初始化核心函数 esp_err_t bsp_lcd_init(esp_lcd_panel_handle_t *panel_handle) { // 1. SPI总线配置 spi_bus_config_t spi_conf = { .mosi_io_num = BSP_LCD_SPI_MOSI, .sclk_io_num = BSP_LCD_SPI_CLK, .quadwp_io_num = -1, .quadhd_io_num = -1, .max_transfer_sz = BSP_LCD_H_RES * 80 * 2, // 最大传输尺寸 }; ESP_ERROR_CHECK(spi_bus_initialize(BSP_LCD_SPI_NUM, &spi_conf, SPI_DMA_CH_AUTO)); // 2. LCD IO配置(DC引脚、SPI参数) esp_lcd_panel_io_spi_config_t io_conf = { .dc_gpio_num = BSP_LCD_DC, .cs_gpio_num = -1, // CS由PCA9557控制 .pclk_hz = 40 * 1000 * 1000, // 40MHz SPI时钟 .lcd_cmd_bits = 8, .lcd_param_bits = 8, .spi_mode = 0, }; ESP_ERROR_CHECK(esp_lcd_new_panel_io_spi((spi_host_device_t)BSP_LCD_SPI_NUM, &io_conf, &io_handle)); // 3. ST7789面板初始化 esp_lcd_panel_dev_config_t panel_conf = { .reset_gpio_num = -1, // 复位由PCA9557控制 .color_space = ESP_LCD_COLOR_SPACE_RGB, .bits_per_pixel = 16, }; return esp_lcd_new_panel_st7789(io_handle, &panel_conf, panel_handle); } |
3.4 驱动验证:点亮屏幕(整屏配色)
完成驱动移植后,先通过整屏配色验证驱动是否正常:
|
C // 整屏显示指定颜色 void lcd_fill_screen(esp_lcd_panel_handle_t panel, uint16_t color) { uint16_t *buf = heap_caps_malloc(BSP_LCD_H_RES * 2, MALLOC_CAP_SPIRAM); memset(buf, color, BSP_LCD_H_RES * 2); // 填充一行颜色数据 // 逐行写入屏幕 for (int y = 0; y < BSP_LCD_V_RES; y++) { esp_lcd_panel_draw_bitmap(panel, 0, y, BSP_LCD_H_RES, y+1, buf); } free(buf); // 释放内存 } // app_main中调用验证 void app_main(void) { esp_lcd_panel_handle_t panel; bsp_i2c_init(); // I2C初始化 pca9557_init(); // IO扩展芯片初始化 bsp_lcd_init(&panel); // LCD屏初始化 esp_lcd_panel_reset(panel); esp_lcd_panel_init(panel); esp_lcd_panel_disp_on_off(panel, true); lcd_fill_screen(panel, 0x00FF); // 整屏显示黄色 } |
四、功能层实现:从静态显示到动态交互
驱动验证通过后,实现机器人实训中常用的图片、字符、汉字、动态GIF显示功能。
4.1 静态图片显示:图片取模与优化
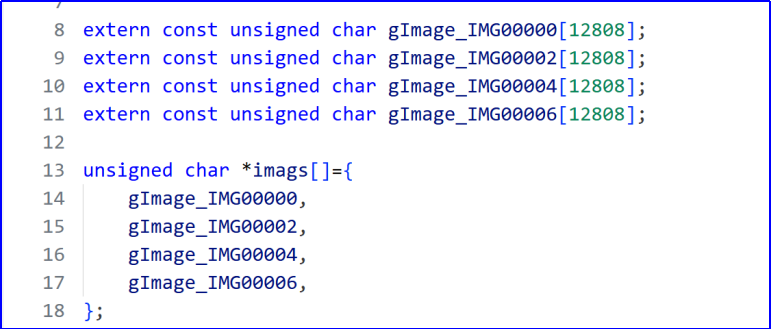
LCD无法直接识别图片文件,需通过取模软件转换为C数组,核心步骤:
- 用Image2Lcd v4.0打开图片,设置:输出C数组、16位真彩色、水平扫描、包含图像头;
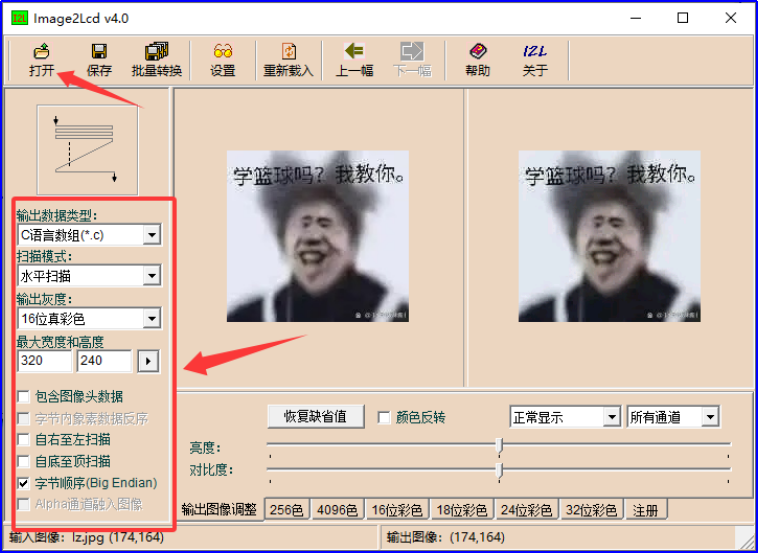
- 保存取模文件到main/include,在代码中引入并显示:
4.2 字符与汉字显示:字模技术实战
字符/汉字显示是机器人显示学号、班级、传感器数据的核心功能:
4.2.1 英文字符显示(16×8点阵)
|
C // LCDFont.h中定义16×8 ASCII字模库 extern const uint8_t ascii_1608[95][16]; // 显示单个英文字符 void lcd_show_char(esp_lcd_panel_handle_t panel, int x, int y, char c, uint16_t fg_color, uint16_t bg_color) { uint8_t idx = c - 0x20; // 转换为字模库索引 uint16_t *buf = heap_caps_malloc(16*2, MALLOC_CAP_SPIRAM); // 解析点阵,生成像素数据 for (int i = 0; i < 16; i++) { uint8_t byte = ascii_1608[idx][i]; for (int j = 0; j < 8; j++) { buf[i*8 + j] = (byte & (1 << j)) ? fg_color : bg_color; } } esp_lcd_panel_draw_bitmap(panel, x, y, x+8, y+16, buf); free(buf); } |
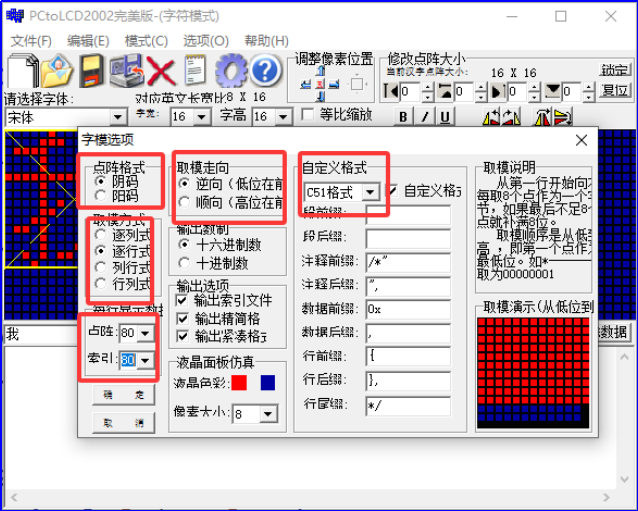
4.2.2 汉字显示(16×16点阵)
汉字取模&显示
|
C // 汉字字模结构体 typedef struct { char hz[4]; // 汉字(如"机器人") uint8_t msk[32]; // 16×16点阵数据 } chinese_font_t; // 自定义汉字字模数组 const chinese_font_t hz_font[] = { {"机", {0x00,0x00,0xF8,0x3F,0x08,0x01,0x08,0x01,0xFF,0xFF,0x08,0x01,0x08,0x01,0xF8,0x3F,0x00,0x00,0x00,0x00,0xFC,0x1F,0x04,0x20,0x04,0x20,0xFF,0xFF,0x04,0x20,0x04,0x20}}, {"器", {0x00,0x00,0x70,0x0F,0x08,0x08,0x08,0x08,0x70,0x0F,0x00,0x00,0xFC,0x3F,0x44,0x22,0x44,0x22,0x44,0x22,0x44,0x22,0xFC,0x3F,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00}}, }; // 显示单个汉字 void lcd_show_hz(esp_lcd_panel_handle_t panel, int x, int y, const char *hz, uint16_t fg_color, uint16_t bg_color) { // 查找字模 for (int i = 0; i < sizeof(hz_font)/sizeof(chinese_font_t); i++) { if (strcmp(hz_font[i].hz, hz) == 0) { uint16_t *buf = heap_caps_malloc(16*2, MALLOC_CAP_SPIRAM); // 解析点阵 for (int row = 0; row < 16; row++) { uint8_t byte1 = hz_font[i].msk[row*2]; uint8_t byte2 = hz_font[i].msk[row*2+1]; for (int col = 0; col < 16; col++) { uint8_t bit = (col < 8) ? (byte1 & (1 << col)) : (byte2 & (1 << (col-8))); buf[row*16 + col] = bit ? fg_color : bg_color; } } esp_lcd_panel_draw_bitmap(panel, x, y, x+16, y+16, buf); free(buf); return; } } } |
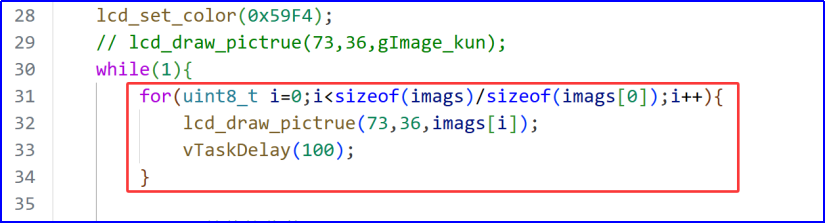
4.3 动态GIF显示:让机器人“活”起来
将GIF拆解为单帧图片,批量取模后循环显示,核心代码:
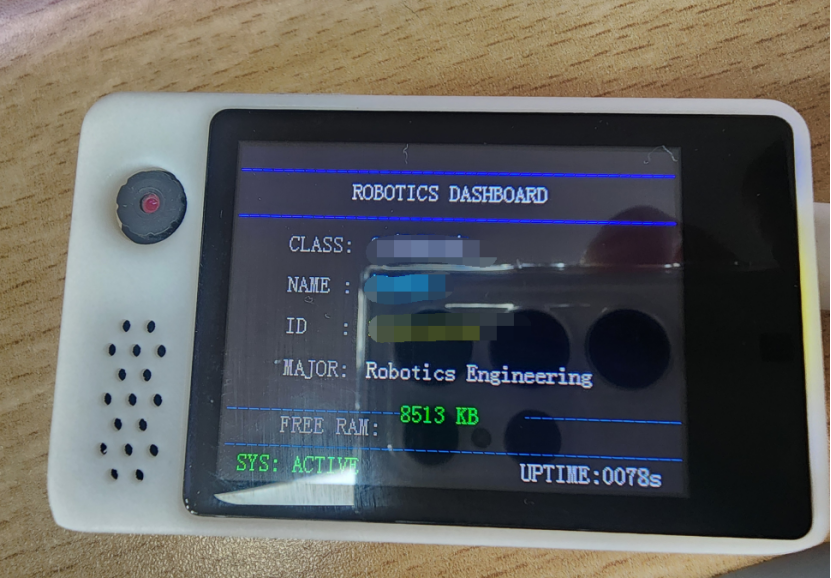
4.4 实训小作业:机器人信息界面开发
结合以上功能,实现包含学号、班级、姓名的LCD界面,示例代码:
|
C void lcd_show_info(esp_lcd_panel_handle_t panel) { lcd_fill_screen(panel, 0xE6E6); // 浅灰色背景 // 显示大字体班级 lcd_show_hz_30(panel, 20, 20, "机器人工程2班", 0xFF00, 0xE6E6); // 30×30大字体 // 显示学号和姓名 lcd_show_string(panel, 20, 80, "学号:20250904001 姓名:张三", 0x0000, 0xE6E6); // 显示装饰图片 lcd_show_image(panel, 200, 20, gImage_robot); } |
五、实训高频避坑指南:快速定位问题
|
问题现象 |
核心原因 |
解决方案 |
|
编译报错:Memory for bitmap is not enough |
未开启PSRAM或内存分配未指定MALLOC_CAP_SPIRAM |
开启PSRAM,使用heap_caps_malloc分配内存并检查返回值 |
|
汉字显示乱码 |
字模点阵不匹配、编码格式(UTF-8/GBK)不一致 |
重新取模目标汉字,统一编码格式为GBK |
|
屏幕白屏/花屏 |
SPI极性(CPOL/CPHA)不匹配、复位时序过快 |
调整SPI模式,增加复位后vTaskDelay等待 |
|
动态GIF卡顿 |
单帧过多、未用DMA传输、帧率过快 |
隔帧删除冗余图片,开启SPI DMA,增大vTaskDelay |
|
编译报错:undefined reference to xxx |
CMakeLists未配置组件依赖/头文件路径 |
检查REQUIRES依赖和INCLUDE_DIRS路径 |
六、教学进阶:从实训到工业级开发
掌握基础驱动后,可向工业级项目拓展,提升工程能力:
- 引入LVGL图形库:实现按钮、列表、进度条等复杂UI,重点优化显示缓冲区(单/双缓冲);
- 低功耗设计:机器人休眠时,通过PWM调低背光,ESP32进入Light-sleep模式;
- 数据绑定:用FreeRTOS队列将传感器数据(距离、温湿度)传递给显示任务,实现实时更新;
- 触摸交互:搭配触摸屏,实现点击LCD切换机器人工作模式(自动/手动)。
七、总结
ESP32-S3驱动LCD的过程,不仅是代码的实现,更是嵌入式工程思维的培养:
- 核心重点:PSRAM内存管理是解决显示问题的关键,组件化开发提升代码复用性;
- 实训价值:通过LCD开发掌握SPI/I2C/PWM外设使用、字模技术、时序调试等核心技能;
- 工程拓展:LCD作为机器人HMI核心,可结合传感器、WiFi/Bluetooth实现更复杂的交互功能。
嵌入式开发的核心是“实战+复盘”,从点亮屏幕到实现动态交互,每一步踩坑都是成长的机会。后续可尝试将LCD与摄像头结合,实现机器人视觉数据的实时显示,让实训项目更贴近工业应用!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 6
6 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)