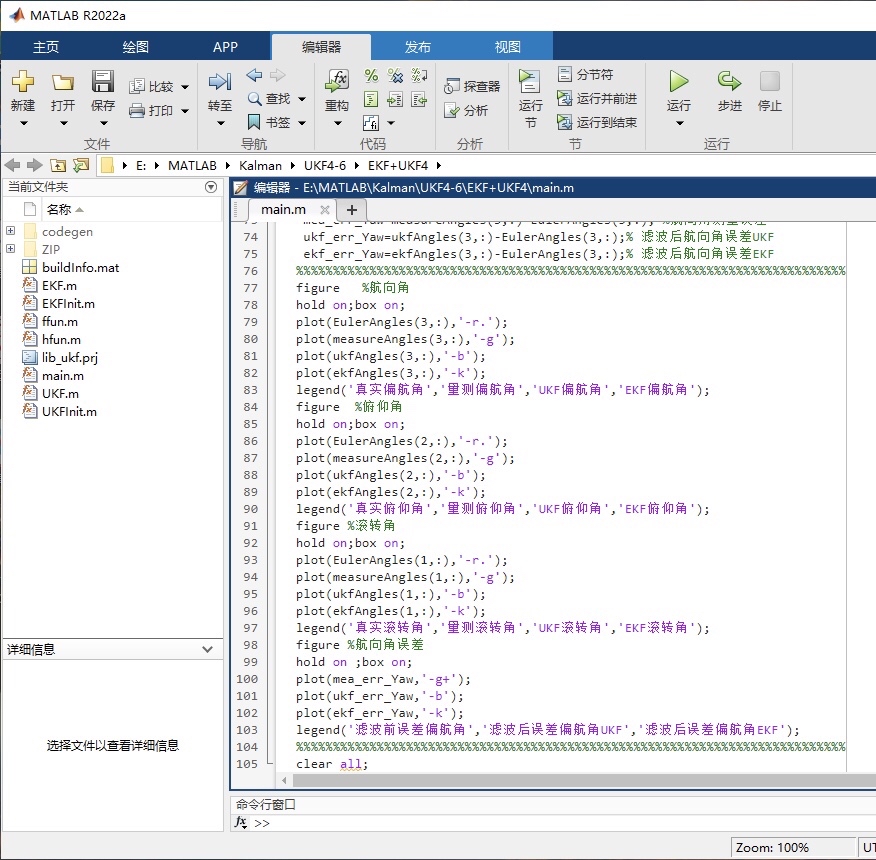
卡尔曼滤波四元数姿态角仿真:EKF与UKF算法的激情碰撞
卡尔曼滤波四元数姿态角仿真程序,EKF,UKF算法对比,附带C语言压缩包。新增完整的单片机UKF实验项目代码!基于stm32h750+mpu9250+w25q64实现串口输出姿态角度和保存校准参数。附带测量一次运行时间的创新功能,通过核心板按键的方式校准IMU单元。软件工程调用keil中自带库方式组织,大大减小了软件包大小!!最近在研究姿态解算相关的内容,给大家分享下卡尔曼滤波四元数姿态角仿真程序
卡尔曼滤波四元数姿态角仿真程序,EKF,UKF算法对比,附带C语言压缩包。 新增完整的单片机UKF实验项目代码! 基于stm32h750+mpu9250+w25q64实现串口输出姿态角度和保存校准参数。 附带测量一次运行时间的创新功能,通过核心板按键的方式校准IMU单元。 软件工程调用keil中自带库方式组织,大大减小了软件包大小!!
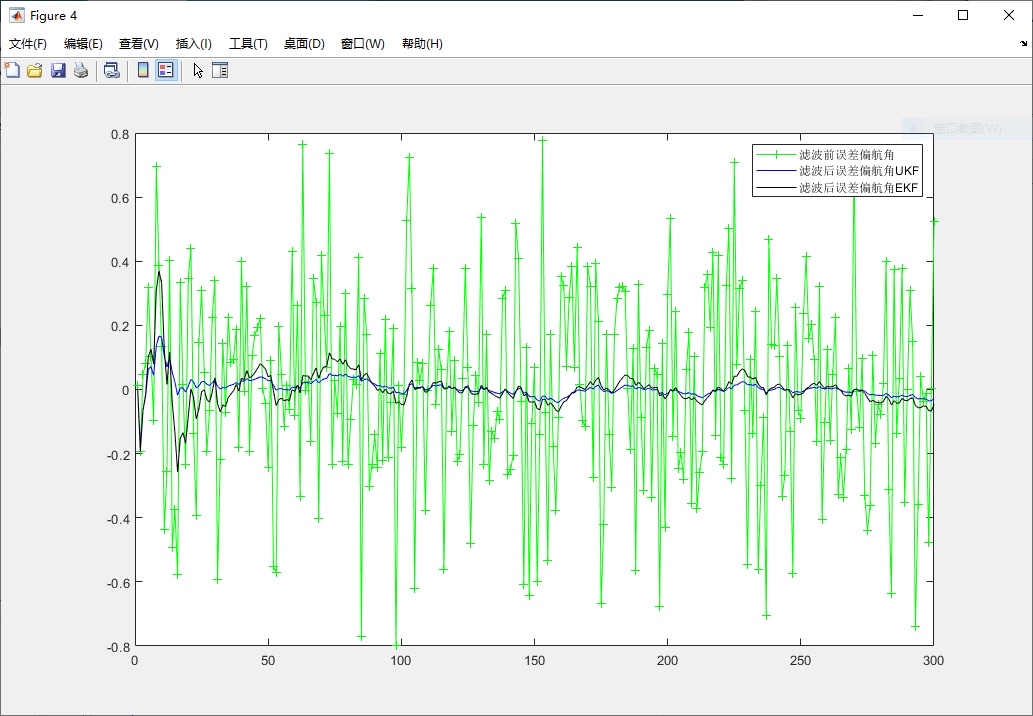
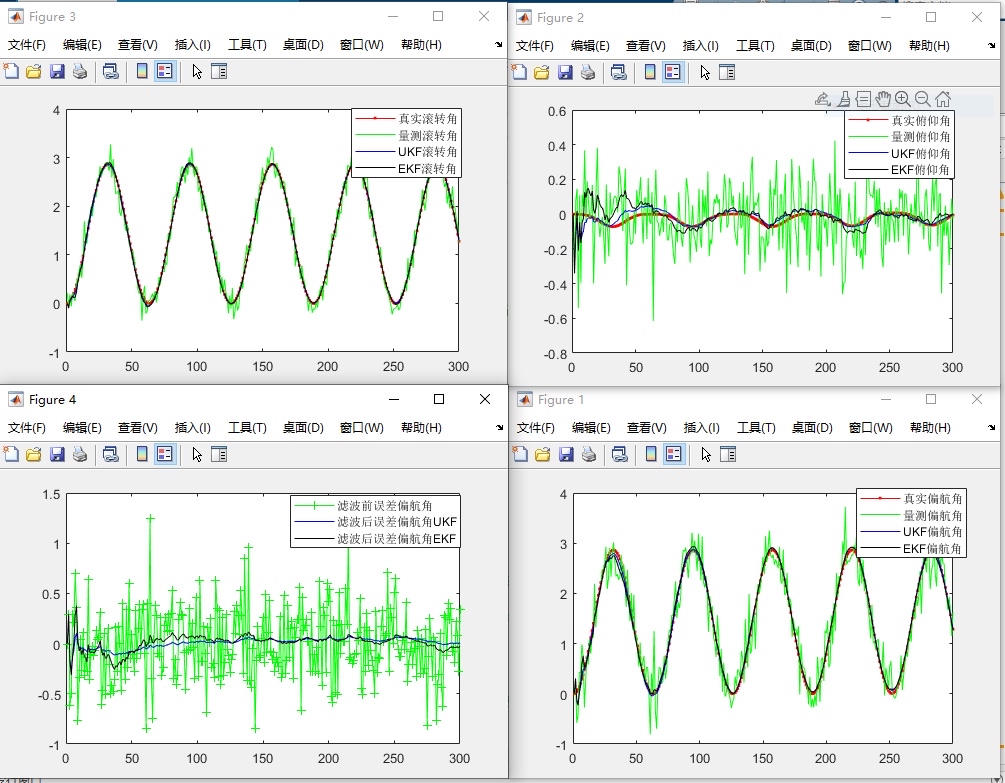
最近在研究姿态解算相关的内容,给大家分享下卡尔曼滤波四元数姿态角仿真程序里EKF(扩展卡尔曼滤波)和UKF(无迹卡尔曼滤波)算法的对比,还附上了C语言压缩包哦,方便大家实操。
EKF与UKF算法初窥
EKF是将非线性系统在当前估计值处进行一阶泰勒展开,从而将非线性问题近似为线性问题,再套用卡尔曼滤波框架。然而这种线性化近似在非线性较强时,会带来较大误差。
卡尔曼滤波四元数姿态角仿真程序,EKF,UKF算法对比,附带C语言压缩包。 新增完整的单片机UKF实验项目代码! 基于stm32h750+mpu9250+w25q64实现串口输出姿态角度和保存校准参数。 附带测量一次运行时间的创新功能,通过核心板按键的方式校准IMU单元。 软件工程调用keil中自带库方式组织,大大减小了软件包大小!!
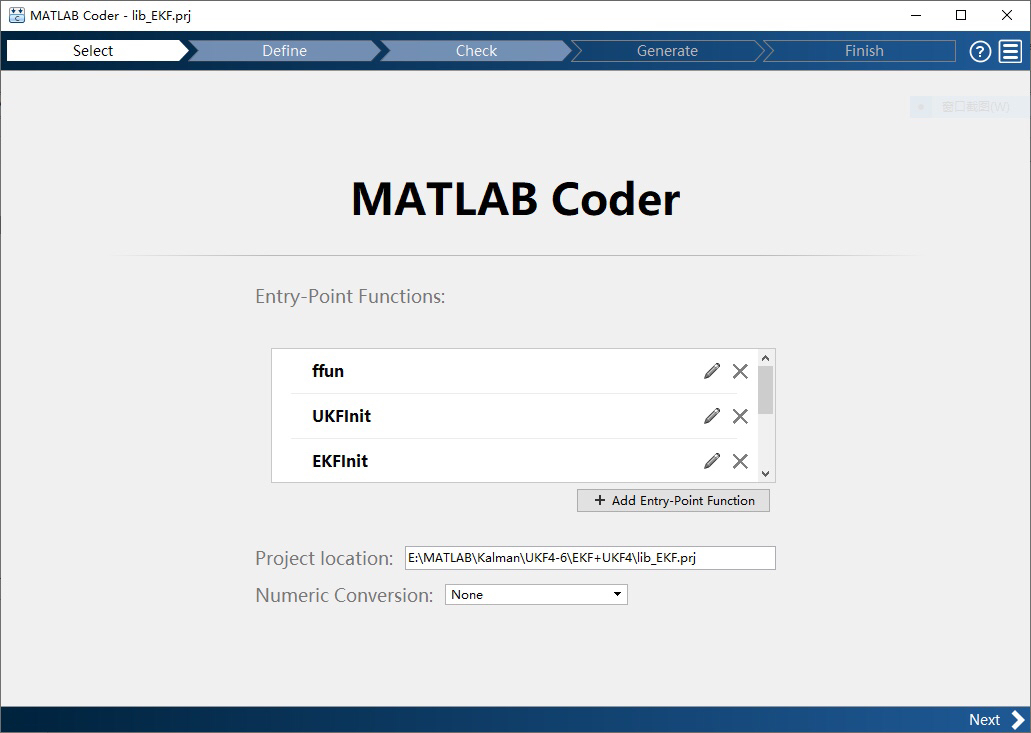
UKF则采用UT变换,通过选取一组Sigma点来近似系统的概率分布,能够更准确地处理非线性问题,在很多场景下表现优于EKF 。
单片机UKF实验项目大放送
现在还有完整的单片机UKF实验项目代码!这个项目基于stm32h750 + mpu9250 + w25q64 来实现串口输出姿态角度以及保存校准参数。
核心代码片段与解析
// 初始化MPU9250传感器
void MPU9250_Init(void) {
// 这里配置MPU9250的寄存器,设置采样率、量程等参数
I2C_Write_Byte(MPU9250_ADDR, MPU9250_PWR_MGMT_1, 0x01);
// 唤醒MPU9250
delay_ms(100);
I2C_Write_Byte(MPU9250_ADDR, MPU9250_SMPLRT_DIV, 0x07);
// 设置采样率分频器
I2C_Write_Byte(MPU9250_ADDR, MPU9250_CONFIG, 0x06);
// 设置陀螺仪低通滤波器
I2C_Write_Byte(MPU9250_ADDR, MPU9250_GYRO_CONFIG, 0x18);
// 设置陀螺仪量程为±2000°/s
I2C_Write_Byte(MPU9250_ADDR, MPU9250_ACCEL_CONFIG, 0x18);
// 设置加速度计量程为±16g
}
// UKF核心预测更新部分简化示意
void UKF_Predict_Update(float acc[3], float gyro[3]) {
// 这里省略复杂的UKF参数初始化等
// 预测步骤
for (int i = 0; i < 2 * N + 1; i++) {
// 计算Sigma点的状态预测值
x_hat_minus[i] = f(x_hat_plus[i - 1], dt);
}
// 更新步骤
// 计算卡尔曼增益等操作
// 根据测量值acc和gyro更新状态估计
}在MPU9250Init函数里,通过I2C通信对MPU9250的各个寄存器进行配置,让传感器能按我们期望的参数工作。而UKFPredict_Update函数只是简化示意了UKF算法的预测和更新步骤,实际项目中会更复杂,涉及到大量矩阵运算等。
创新功能:测量运行时间
这个项目还附带了测量一次运行时间的创新功能。实现起来也很有意思,通过一些定时器相关的操作就能做到。
// 测量运行时间相关代码示意
TIM_HandleTypeDef TIMx_Init(void) {
TIM_HandleTypeDef htim;
htim.Instance = TIMx;
htim.Init.Prescaler = 84 - 1;
// 预分频器,72MHz / (84) = 1MHz
htim.Init.CounterMode = TIM_COUNTERMODE_UP;
htim.Init.Period = 65535;
HAL_TIM_Base_Init(&htim);
return htim;
}
void Start_Time_Measure(TIM_HandleTypeDef *htim) {
HAL_TIM_Base_Start(htim);
}
uint32_t Get_Running_Time(TIM_HandleTypeDef *htim) {
return __HAL_TIM_GET_COUNTER(htim);
}通过TIMxInit函数初始化定时器,StartTimeMeasure启动计时,GetRunning_Time获取运行时间计数值,根据定时器的时钟频率就能换算出实际运行时间。
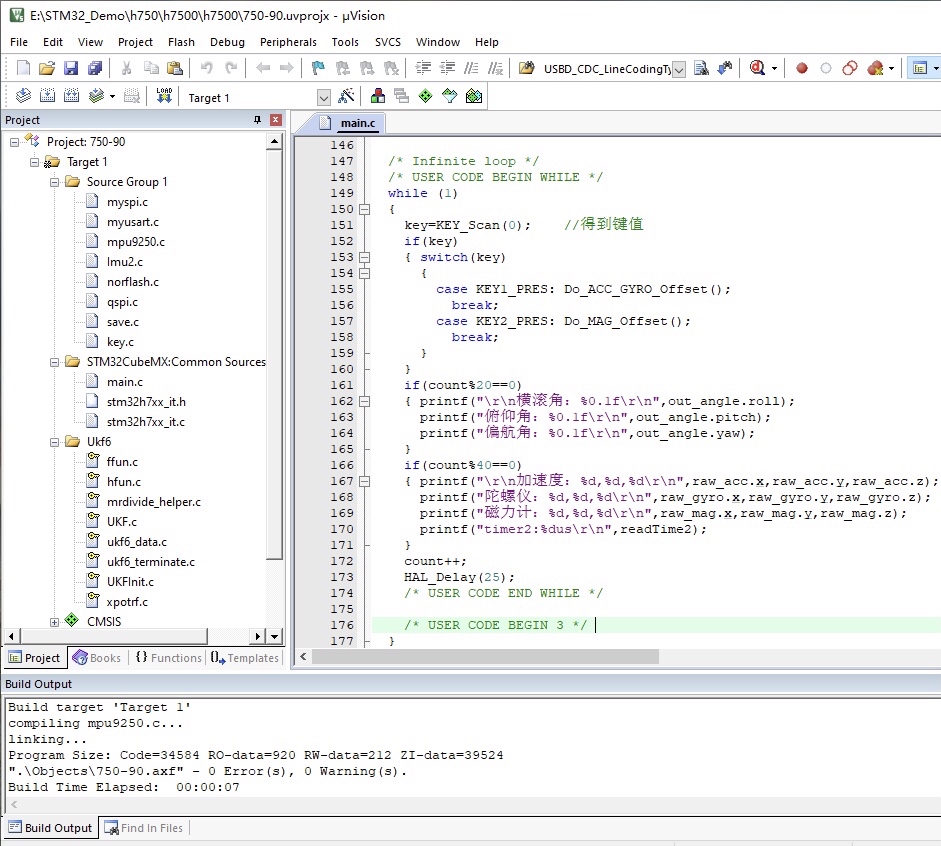
按键校准IMU单元
通过核心板按键的方式校准IMU单元,这让整个项目更加实用。代码里大概是这样实现按键检测和校准操作的:
// 按键检测与校准相关代码
void Check_Key_For_Calibration(void) {
if (HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin) == GPIO_PIN_RESET) {
// 检测到按键按下
delay_ms(50);
// 消抖
if (HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin) == GPIO_PIN_RESET) {
// 再次确认按键按下
// 执行IMU校准相关函数
IMU_Calibration();
}
while (HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin) == GPIO_PIN_RESET);
// 等待按键释放
}
}CheckKeyForCalibration函数不断检测按键状态,当检测到按键按下并经过消抖确认后,就调用IMUCalibration函数执行校准操作。
软件工程组织优化
在软件工程方面,采用调用keil中自带库的方式来组织,大大减小了软件包大小。这是个很实用的技巧,通过合理利用官方提供的库,避免了重复造轮子,也减少了代码冗余。
整个项目无论是对于学习姿态解算,还是研究卡尔曼滤波算法的实际应用,都非常有价值,大家可以下载C语言压缩包,自己动手实践看看哦!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 6
6 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)