s.bus从原理到应用
S.Bus协议是日本Futaba公司开发的串行数字通信协议,专为遥控模型和无人机设计。相比传统的PWM协议,S.Bus通过单根信号线传输多达16个通道数据,具有布线简单、抗干扰强和延迟低等优势。其技术特点包括:100kbps固定波特率、8E2数据格式、反向电平和25字节帧结构。硬件连接需注意电平反相处理,可通过三极管电路或单片机内置功能实现。文章提供了基于STM32的驱动代码实现方案,并对比了S.
在现代航模、无人机竞速以及机器人控制的广阔世界里,信号的传输方式直接决定了设备的性能上限。如果你曾打开过一架高端无人机,可能会惊讶地发现,连接接收机和飞控的仅仅是一根细细的信号线,而非一捆复杂的排线。这根线背后所承载的技术,就是我们今天要深入探讨的主角——S.Bus协议
目录
1.什么是s.bus?
S.Bus(Serial Bus)是由日本Futaba公司(双叶电子)开发的一种串行数字通信协议,专为遥控模型和无人机系统设计 。在S.Bus出现之前,航模领域的主流标准是PWM(脉冲宽度调制)。PWM虽然简单直接,但其最大的弊端在于“一个通道一根线”:如果你想控制8个通道,就需要从接收机引出8根独立的信号线连接到对应的舵机或飞控。这不仅导致布线复杂、重量增加,而且模拟信号也容易受到电磁干扰。
S.Bus的出现彻底改变了这一局面。它借鉴了数字总线的思想,将多达16个比例通道(甚至加上2个数字通道)的数据打包,通过单根信号线进行高速串行传输 。这就像将一个车道上只能跑一辆车的乡间小路(PWM),扩建成了可以容纳16辆车并排行的高铁(S.Bus),效率不言而喻。
2.深入浅出s.bus原理
要理解S.Bus,关键在于解析它的“说话方式”。它并不是简单的电平变化,而是有着严格时序和格式的数据帧。
2.1 通信参数:特立独行的“暗号”
S.Bus的物理层基于改进的UART(串口)通信,但其参数非常特殊:
-
波特率:固定在100000 bps(100k)。这是一个非常关键的数字,它不等于计算机常用的115200 bps,因此在配置飞控或单片机串口时需格外注意,否则会导致乱码 。
-
数据格式:8位数据位,偶校验(Even Parity),2位停止位。通常简写为8E2 。
-
电平逻辑:反向电平(Inverted Logic)。这是S.Bus最容易让初学者困惑的地方。在标准TTL电平中,高电平(3.3V/5V)代表逻辑“1”,低电平(0V)代表逻辑“0”。而S.Bus恰恰相反:物理低电平代表逻辑“1”,物理高电平代表逻辑“0” 。这意味着,如果你想用STM32或Arduino的直接读取S.Bus信号,必须经过硬件反相处理。
2.2 数据帧结构:25字节的秘密
S.Bus的数据以“帧”为单位进行传输,每帧固定为25个字节,结构如下表所示
| 字节位置 | 功能 | 描述 |
| Byte1 | 帧头 | 固定为 0x0F,标志着一帧数据的开始。 |
| Byte2 ~ 23 | 通道数据 | 这是核心的22个字节。由于每帧需要传输16个通道,每个通道的分辨率为11位(取值范围0~2047),16 x 11 = 176位,正好是22个字节。这些数据按高位字节优先的顺序紧密排列。 |
| Byte24 | 标志位 | 1个字节,包含两个重要状态:帧丢失(Frame Lost)和故障保护(Failsafe)标志。此外,它还包含了第17和第18两个数字通道(通常是开关量)的信息 |
| Byte25 | 帧尾 | 固定为0x00 |
2.3 传输速率
为了满足不同场景的需求,S.Bus通常有两种传输模式:
-
高速模式:每4ms发送一帧,适用于延迟敏感的竞速无人机。
-
低速模式:每14ms发送一帧,适用于普通的航模飞行控制 。
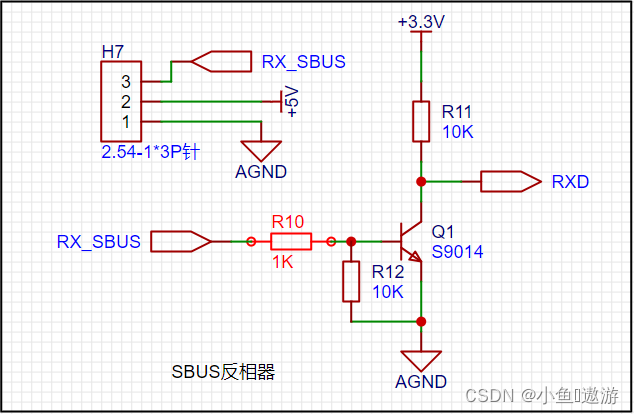
3.硬件连接:不可或缺的反相电路
由于S.Bus采用反向电平,它无法直接与大多数单片机(如STM32、Arduino)的USART引脚通信。如果直接连接,单片机将无法识别信号。因此,硬件上需要一个简单的反相器电路。
最常见的做法是使用一颗NPN三极管(如S9014、2N2222)和两个电阻(1kΩ和10kΩ)搭建电平转换电路 。
-
基本原理:利用三极管的开关特性,将S.Bus的反向信号“翻转”成单片机可识别的正向信号。
-
更简单的方案:许多现代飞控(如Pixhawk)和接收机(如FrSky部分型号)已经内置了反相器或提供了“SBUS(inverted)”选项,可以直接连接。但在自制DIY项目(如基于STM32的机器人)中,你很可能需要搭建这个电路。
4.代码案例
基于STM32F4xx(以STM32F407为例)实现S.Bus信号接收与解析的驱动代码。代码采用HAL库,利用USART的信号极性反转功能直接匹配S.Bus的反向电平,无需外部反相电路,并通过中断方式接收完整的25字节帧。。
4.1 STM32配置要点
- USART引脚:例如使用USART1(PA9-TX,PA10-RX),只接收信号,因此只需连接RX引脚。
- 反向电平处理:STM32的USART支持接收引脚电平反转(
RXINV),使能后即可直接匹配S.Bus的反向逻辑。 - 波特率计算:确保系统时钟配置能使USART产生精确的100000 bps。例如,若APB2外设时钟为84MHz,则USART分频系数 = 84000000 / 100000 = 840,可通过
USART_BRR设置(整数部分=840>>4=52,小数部分=840&0xF=8)。 - 中断优先级:适当配置NVIC。
4.2 驱动实现
4.2.1 USART初始化函数
#include "stm32f4xx_hal.h"
UART_HandleTypeDef huart1;
uint8_t sbus_rx_buffer[25]; // 接收缓冲区
uint8_t sbus_rx_index = 0; // 当前接收字节索引
uint8_t sbus_frame_ready = 0; // 帧完成标志
void MX_USART1_SBUS_Init(void)
{
// 1. 使能时钟
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
// 2. 配置GPIO:PA10为USART1_RX,复用推挽
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL; // S.Bus通常不需要上拉/下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 3. 配置UART参数
huart1.Instance = USART1;
huart1.Init.BaudRate = 100000;
huart1.Init.WordLength = UART_WORDLENGTH_8B; // 8位数据
huart1.Init.StopBits = UART_STOPBITS_2; // 2位停止
huart1.Init.Parity = UART_PARITY_EVEN; // 偶校验
huart1.Init.Mode = UART_MODE_RX; // 仅接收
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart1);
// 4. 使能高级特性:RX引脚电平反转(匹配S.Bus反向逻辑)
UART_AdvFeatureInitTypeDef adv = {0};
adv.AdvFeatureInit = UART_ADVFEATURE_RXINVERT_INIT;
adv.RxPinLevelInvert = UART_ADVFEATURE_RXINVERT_ENABLE;
HAL_UART_AdvFeatureConfig(&huart1, &adv);
}4.2.2 启动中断接收
void SBUS_Start_Receive(void)
{
sbus_rx_index = 0;
sbus_frame_ready = 0;
// 使能接收中断,每次接收一个字节
HAL_UART_Receive_IT(&huart1, &sbus_rx_buffer[0], 1);
}4.2.3 中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
sbus_rx_index++;
// 检测帧头:第一个字节必须为0x0F,否则复位接收
if (sbus_rx_index == 1 && sbus_rx_buffer[0] != 0x0F)
{
sbus_rx_index = 0;
}
// 当接收到25字节时,检查帧尾是否为0x00
if (sbus_rx_index == 25)
{
if (sbus_rx_buffer[24] == 0x00) // 帧尾正确
{
sbus_frame_ready = 1; // 通知主循环处理
}
else
{
// 帧尾错误,丢弃整帧,重新开始
sbus_rx_index = 0;
}
}
// 继续接收下一个字节(未满25字节时)
if (sbus_rx_index < 25)
{
HAL_UART_Receive_IT(&huart1, &sbus_rx_buffer[sbus_rx_index], 1);
}
else
{
// 已满25字节,等待主循环处理后重新启动接收
// 注意:主循环处理完应将sbus_frame_ready清0并调用SBUS_Start_Receive()
}
}
}4.2.4 解析s.bus数据帧
typedef struct {
uint16_t channels[16]; // 0~2047
uint8_t lost_frame; // 帧丢失标志
uint8_t failsafe; // 故障保护标志
uint8_t ch17; // 数字通道17
uint8_t ch18; // 数字通道18
} SBUS_Data_t;
SBUS_Data_t sbus_data;
void SBUS_ParseFrame(uint8_t *buf, SBUS_Data_t *data)
{
// 提取16个通道(11位/通道)
data->channels[0] = ((uint16_t)buf[1] ) | ((uint16_t)buf[2] << 8) & 0x07FF;
data->channels[1] = ((uint16_t)buf[2] >> 3 ) | ((uint16_t)buf[3] << 5) & 0x07FF;
data->channels[2] = ((uint16_t)buf[3] >> 6 ) | ((uint16_t)buf[4] << 2) | ((uint16_t)buf[5] << 10) & 0x07FF;
data->channels[3] = ((uint16_t)buf[5] >> 1 ) | ((uint16_t)buf[6] << 7) & 0x07FF;
data->channels[4] = ((uint16_t)buf[6] >> 4 ) | ((uint16_t)buf[7] << 4) & 0x07FF;
data->channels[5] = ((uint16_t)buf[7] >> 7 ) | ((uint16_t)buf[8] << 1) | ((uint16_t)buf[9] << 9) & 0x07FF;
data->channels[6] = ((uint16_t)buf[9] >> 2 ) | ((uint16_t)buf[10] << 6) & 0x07FF;
data->channels[7] = ((uint16_t)buf[10] >> 5) | ((uint16_t)buf[11] << 3) & 0x07FF;
data->channels[8] = ((uint16_t)buf[12] ) | ((uint16_t)buf[13] << 8) & 0x07FF;
data->channels[9] = ((uint16_t)buf[13] >> 3) | ((uint16_t)buf[14] << 5) & 0x07FF;
data->channels[10] = ((uint16_t)buf[14] >> 6) | ((uint16_t)buf[15] << 2) | ((uint16_t)buf[16] << 10) & 0x07FF;
data->channels[11] = ((uint16_t)buf[16] >> 1) | ((uint16_t)buf[17] << 7) & 0x07FF;
data->channels[12] = ((uint16_t)buf[17] >> 4) | ((uint16_t)buf[18] << 4) & 0x07FF;
data->channels[13] = ((uint16_t)buf[18] >> 7) | ((uint16_t)buf[19] << 1) | ((uint16_t)buf[20] << 9) & 0x07FF;
data->channels[14] = ((uint16_t)buf[20] >> 2) | ((uint16_t)buf[21] << 6) & 0x07FF;
data->channels[15] = ((uint16_t)buf[21] >> 5) | ((uint16_t)buf[22] << 3) & 0x07FF;
// 标志位
data->lost_frame = (buf[23] & 0x08) ? 1 : 0; // bit3 丢失帧
data->failsafe = (buf[23] & 0x04) ? 1 : 0; // bit2 故障保护
data->ch17 = (buf[23] & 0x01) ? 1 : 0; // bit0 数字通道17
data->ch18 = (buf[23] & 0x02) ? 1 : 0; // bit1 数字通道18
}4.2.5 使用示例
int main(void)
{
HAL_Init();
SystemClock_Config(); // 需配置系统时钟(如168MHz,APB2=84MHz)
MX_USART1_SBUS_Init();
SBUS_Start_Receive();
while (1)
{
if (sbus_frame_ready)
{
// 解析当前帧
SBUS_ParseFrame(sbus_rx_buffer, &sbus_data);
// 使用通道值(例如sbus_data.channels[0]~[15])
// ...
// 重新启动接收下一帧
sbus_frame_ready = 0;
SBUS_Start_Receive();
}
// 其他任务...
}
}5.群雄逐鹿:S.Bus vs. PWM vs. PPM
在遥控协议家族中,S.Bus常被拿来与前辈PWM和PPM比较。它们的主要区别如下:
| 特性 | S.Bus (串行总线) | PPM (脉冲位置调制) | PWM (脉冲宽度调制) |
|---|---|---|---|
| 传输方式 | 数字串行信号 | 模拟串行信号 | 模拟并行信号 |
| 通道数量 | 16+2 通道 | 最多 8-12 通道 | 每通道需单独一根线 |
| 线材需求 | 1根信号线 | 1根信号线 | N根信号线(N=通道数) |
| 分辨率 | 11位 (0-2047) | 通常 10位以下 | 通常较低 |
| 抗干扰性 | 高(数字信号) | 中(模拟信号叠加) | 低(脉宽易受干扰) |
| 延迟 | 最低 (4-14ms) | 中等 (约20ms) | 较高 (约20ms) |
| 系统复杂度 | 需解码,硬件需反相 | 需解码,相对简单 | 即插即用,无需解码 |
结论:虽然PWM在简单场景(如控制一两个模拟舵机)中依然常用,但在追求高性能、高集成度的现代无人机和机器人系统中,S.Bus的优势是压倒性的。
6.应用场景:从天空到地面
6.1 无人机(UAV)与航空航天
这是S.Bus最主要的战场。在多旋翼无人机和固定翼飞机中,S.Bus接收机通过单线连接飞控(如Pixhawk、ArduPilot、Betaflight),传输油门、副翼、升降舵、方向舵以及飞行模式切换等所有指令 。其低延迟特性对于FPV(第一人称视角)竞速无人机来说至关重要。
6.2 机器人控制
在复杂的机器人平台,如多自由度机械臂或轮腿机器人,需要同时控制多个舵机和电机。通过S.Bus总线,可以采用总线拓扑结构连接多个支持S.Bus的舵机,只需将Hub(集线器)接入总线,即可轻松控制所有执行器,极大地简化了机器人内部的布线 。
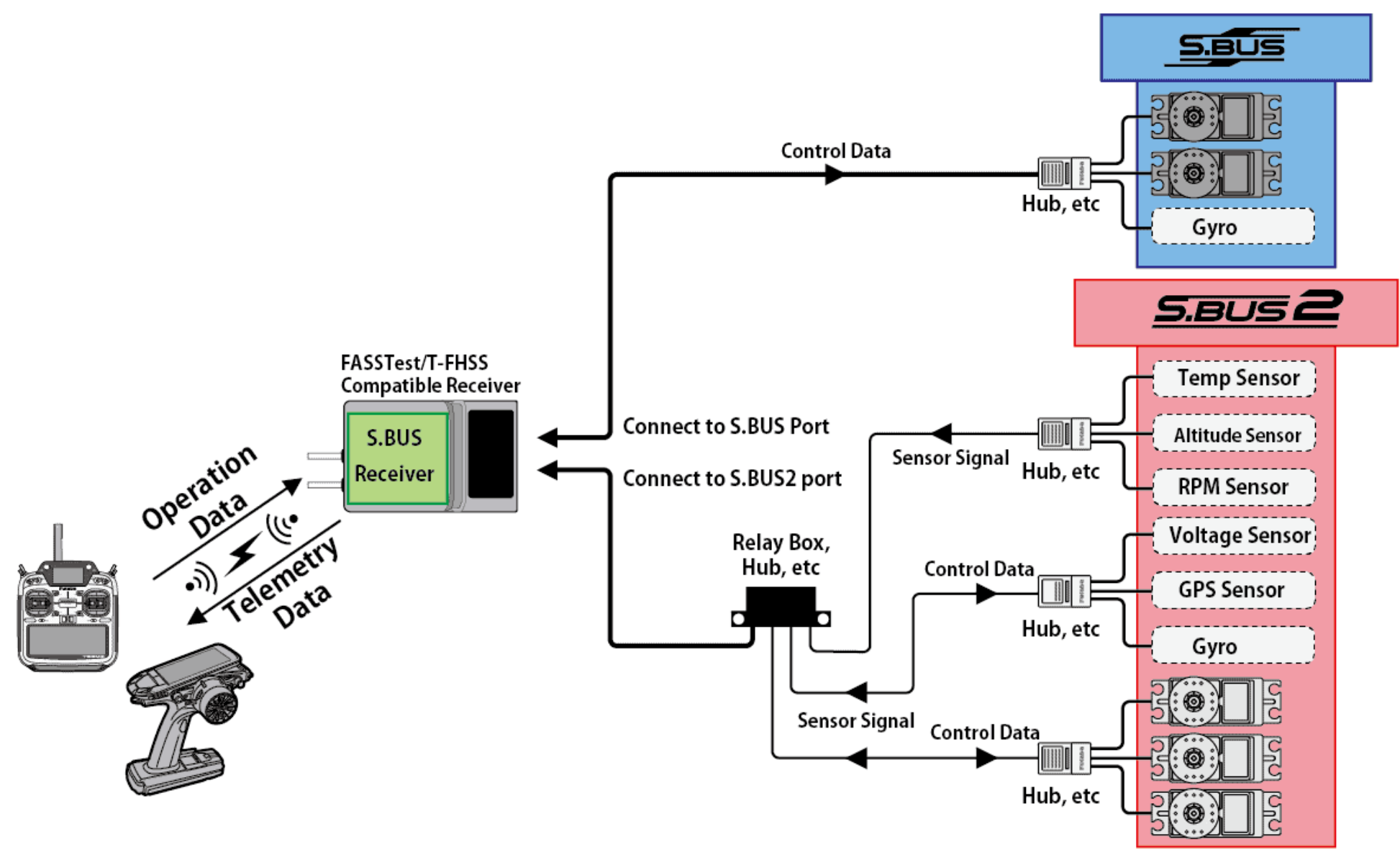
6.3 双向通信与SBUS 2.0
随着技术的发展,Futaba还推出了SBUS 2.0。它不仅支持下行(接收机到舵机/飞控)的控制信号,还支持上行(舵机/传感器到接收机)的遥测数据传输。这意味着你可以通过遥控器的屏幕实时查看舵机的温度、电压或转速等反馈信息,实现真正的“智能控制” 。
7.总结
从一根线控制一个动作,到一根线控制一架飞机,S.Bus协议的出现是遥控模型从模拟时代迈向数字时代的重要里程碑。它通过巧妙的串行帧结构、严谨的校验机制以及独特的反向电平设计,解决了多通道传输的布线难题,并提供了卓越的抗干扰性能和极低的传输延迟。
对于开发者和玩家而言,理解S.Bus的25字节帧结构、100k波特率以及反向电平这三个核心要素,是成功在DIY项目(如STM32、Arduino)中集成遥控功能的关键 。随着无人机和智能机器人技术的持续演进,S.Bus及其后续协议将继续扮演中枢神经的角色,连接着人类的指令与机器的行动。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)