SPI协议
SPI 协议是 Motorola 公司推出的一种同步串行接口技术,是一种高速的,全双工,同步的通信总线。寻址控制:一主多从时确保 SS 线互斥选通,同一时刻仅选中一个从机;时序匹配:严格按从机手册配置 CPOL/CPHA,避免因采样边沿错误导致数据传输失败。
目录
一、SPI 协议简介
1. 协议起源与核心定位
SPI 协议是 Motorola 公司推出的一种同步串行接口技术,是一种高速的,全双工,同步的通信总线。
2. SPI总线拓扑结构
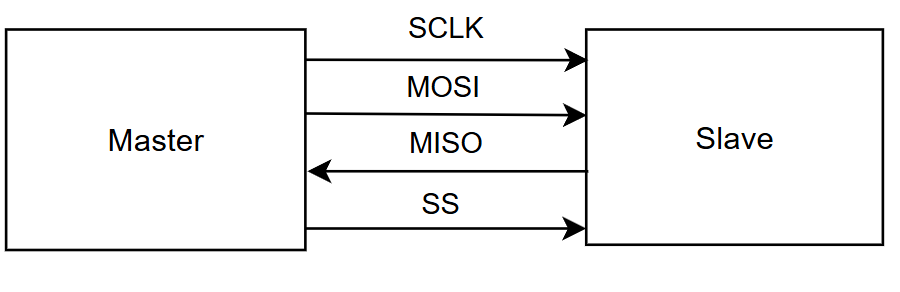
核心信号线:
- SCK(Serial Clock):串行时钟线,由主设备生成,是数据传输的 “节拍器”;
- MOSI(Master Output Slave Input):主出从入线,主设备向从设备发送数据;
- MISO(Master Input Slave Output):主入从出线,从设备向主设备返回数据;
- SS(Slave Select):片选线,主设备通过电平控制选中目标从机(也常称 CS)。
拓扑规则:
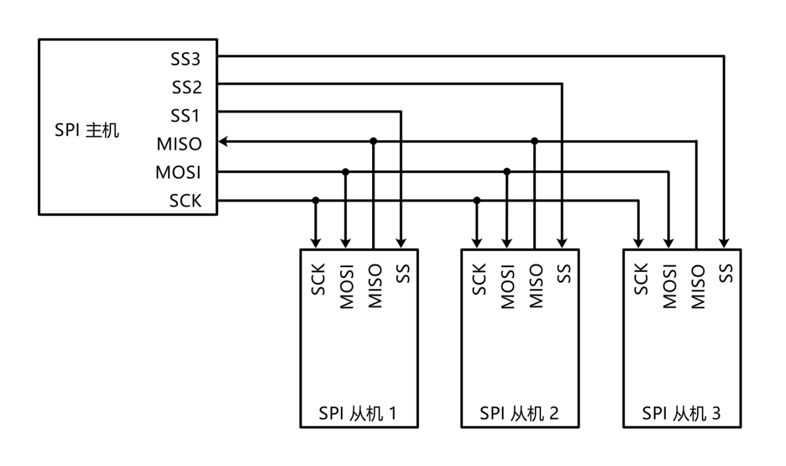
- 支持总线挂载多设备(一主多从),所有从机的 SCK、MOSI、MISO 需共接(共享总线),仅 SS 线独立;
- 硬件配置:输出引脚(SCK、MOSI)配置为推挽输出,输入引脚(MISO)配置为浮空或上拉输入;
- 特殊说明:SPI 一主一从场景下,理论上可省 SS 线,但部分从机(如 W25Q64)强制要求 SS 参与通信,建议仍用 GPIO 控制 SS(或接固定有效电平),避免从机无响应。
3.寻址方式
所有SPI设备的SCK、MOSI、MISO分别连在一起
主机另外引出多条SS控制线,分别接到各从机的SS引脚
输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入
注:SPI如果一主一从,则只需要三根线即可,片选线可以不使用
SPI一主多从通信时,通过SS片选线来区分主机和哪几个从机进行通信,只需要主机将要和从机通信的SS电平拉低即可
关键避坑:一主多从通信时,同一时刻仅能拉低 1 根 SS 线(避免多个从机的 MISO 线冲突);通信结束后需立即拉高 SS,释放从机。
二、SPI通信时序
1.移位示意图
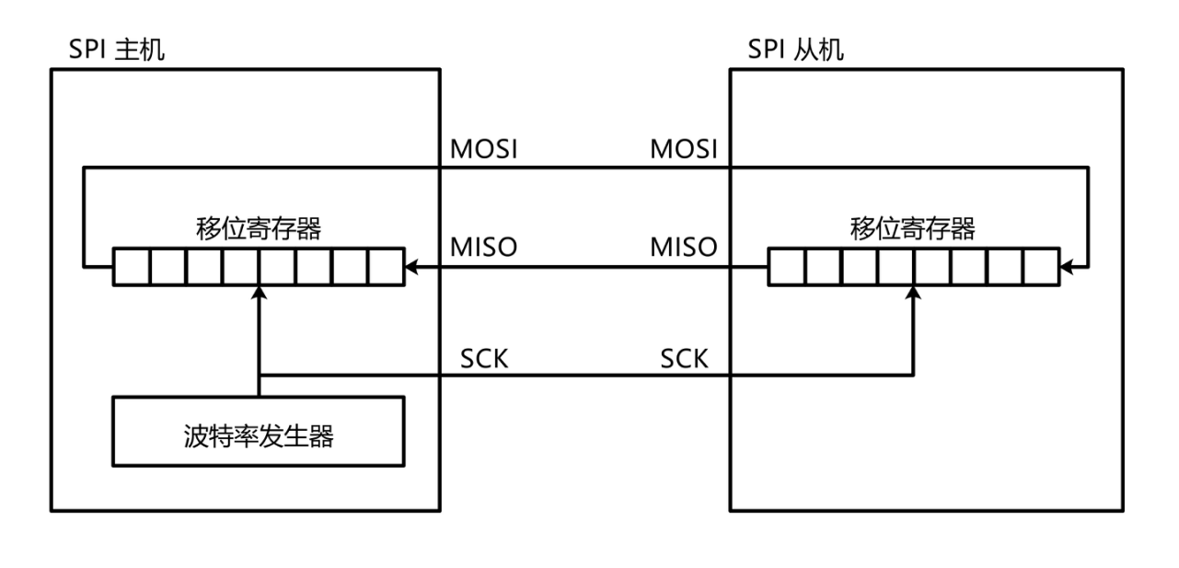
SPI 主设备和从设备内部各有一个 8 位串行移位寄存器,通信时两个寄存器通过 MOSI 和 MISO 线 “首尾相连”,形成 16 位环形结构:
- 主设备向自身 SPI 串行寄存器写入 1 字节数据,即可发起一次传输;
- 在 SCK 时钟驱动下,主从寄存器同步移位:每 1 个 SCK 周期,主从各移出 1 位数据到对应数据线(主机→MOSI、从机→MISO),同时移入对方的 1 位数据;
- 8 个 SCK 周期完成 1 字节数据交换(SPI 通信本质是 “数据交换”,主设备发数据的同时必然接收从机数据)。
2.SPI的基本时序单元
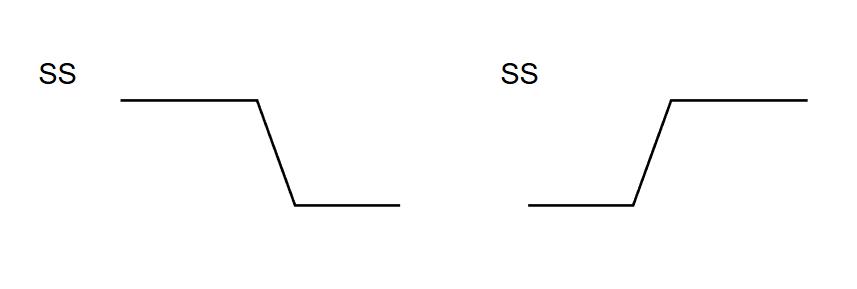
起始条件:SS从高电平切换到低电平
终止条件:SS从低电平切换到高电平
3.交换一个字节
极性和相位
SPI 总线有四种不同的工作模式,取决于极性 (CPOL) 和相位 (CPHA) 这两个因素
极性(CPOL):表示 SCLK 空闲时的状态
- CPOL=0,空闲时 SCLK 为低电平
- CPOL=1,空闲时 SCLK 为高电平
相位(CPHA):表示采样时刻
- CPHA=0,每个周期的第一个时钟沿采样
- CPHA=1,每个周期的第二个时钟沿采样
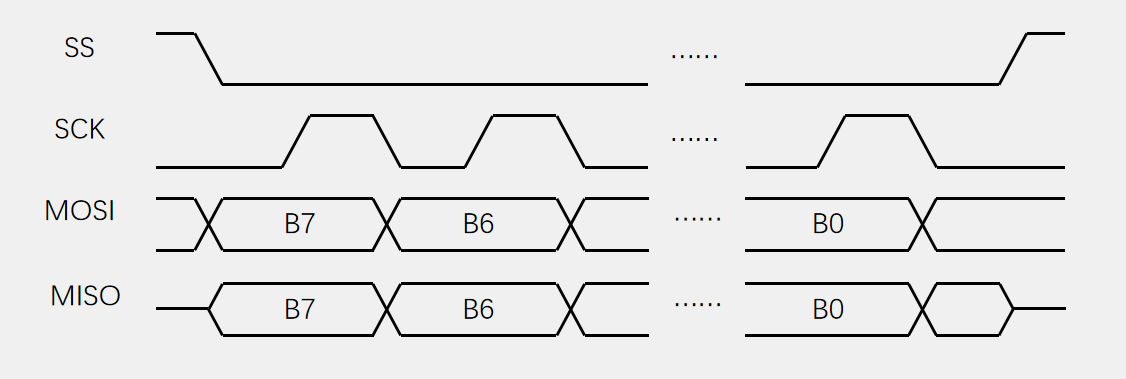
模式0:
CPOL=0:空闲状态时,SCK为低电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据
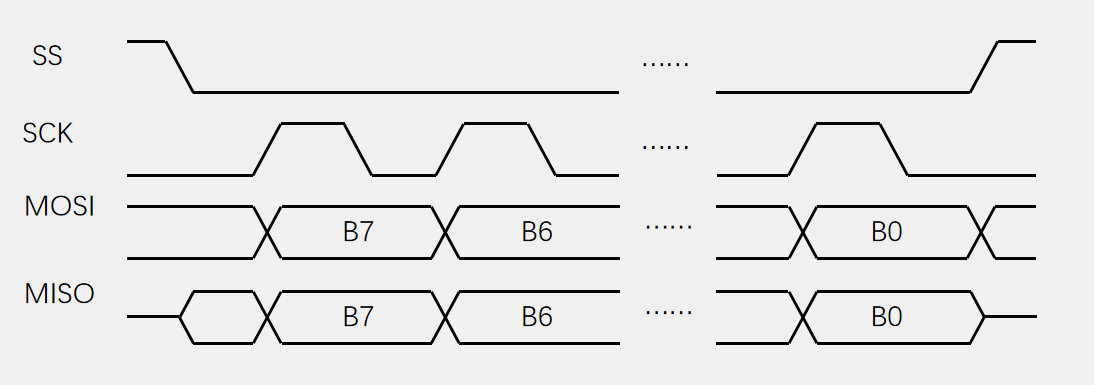
模式1:
CPOL=0:空闲状态时,SCK为低电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据
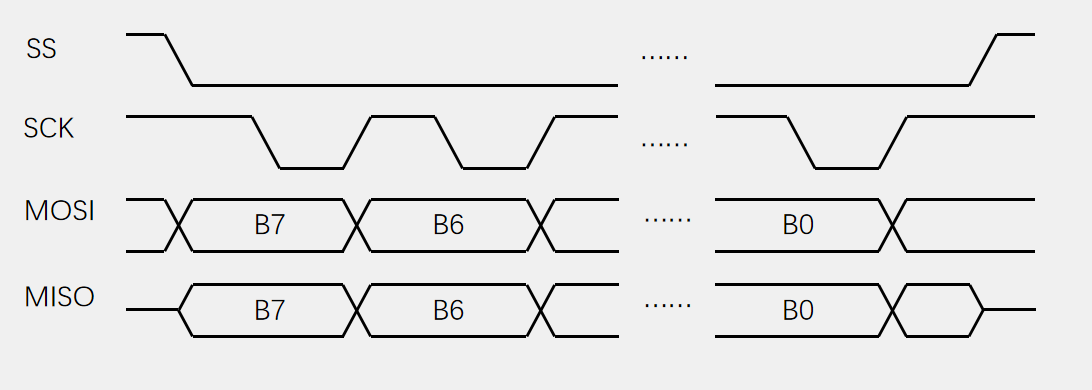
模式2:
CPOL=1:空闲状态时,SCK为高电平
CPHA=0:SCK第一个边沿移入数据,第二个边沿移出数据
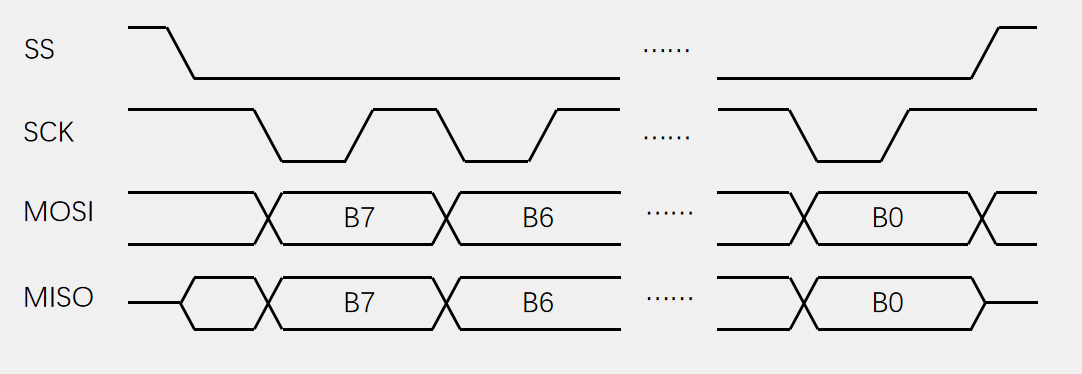
模式3:
CPOL=1:空闲状态时,SCK为高电平
CPHA=1:SCK第一个边沿移出数据,第二个边沿移入数据
三、SPI与IIC的对比

总结
SPI 的核心优势是 “高速全双工 + 硬件简单”,掌握它的关键在于两点:
- 寻址控制:一主多从时确保 SS 线互斥选通,同一时刻仅选中一个从机;
- 时序匹配:严格按从机手册配置 CPOL/CPHA,避免因采样边沿错误导致数据传输失败。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)