基于STM32F030的无刷电机控制及高压FOC成熟方案源码与完整资料包
无刷电机控制一直是嵌入式开发中的一个热门话题,尤其是高压FOC(Field Oriented Control,磁场定向控制)方案,因为它能够提供更高的效率和更精准的控制。这个方案的最大优点是便于移植,因为它没有依赖特定的电机库,所有的代码都是从头实现的,适合各种不同的硬件平台。总的来说,无刷电机控制是一个非常有挑战性的领域,但通过合理的算法设计和保护机制,我们可以实现高效、稳定的控制。电流环是FO
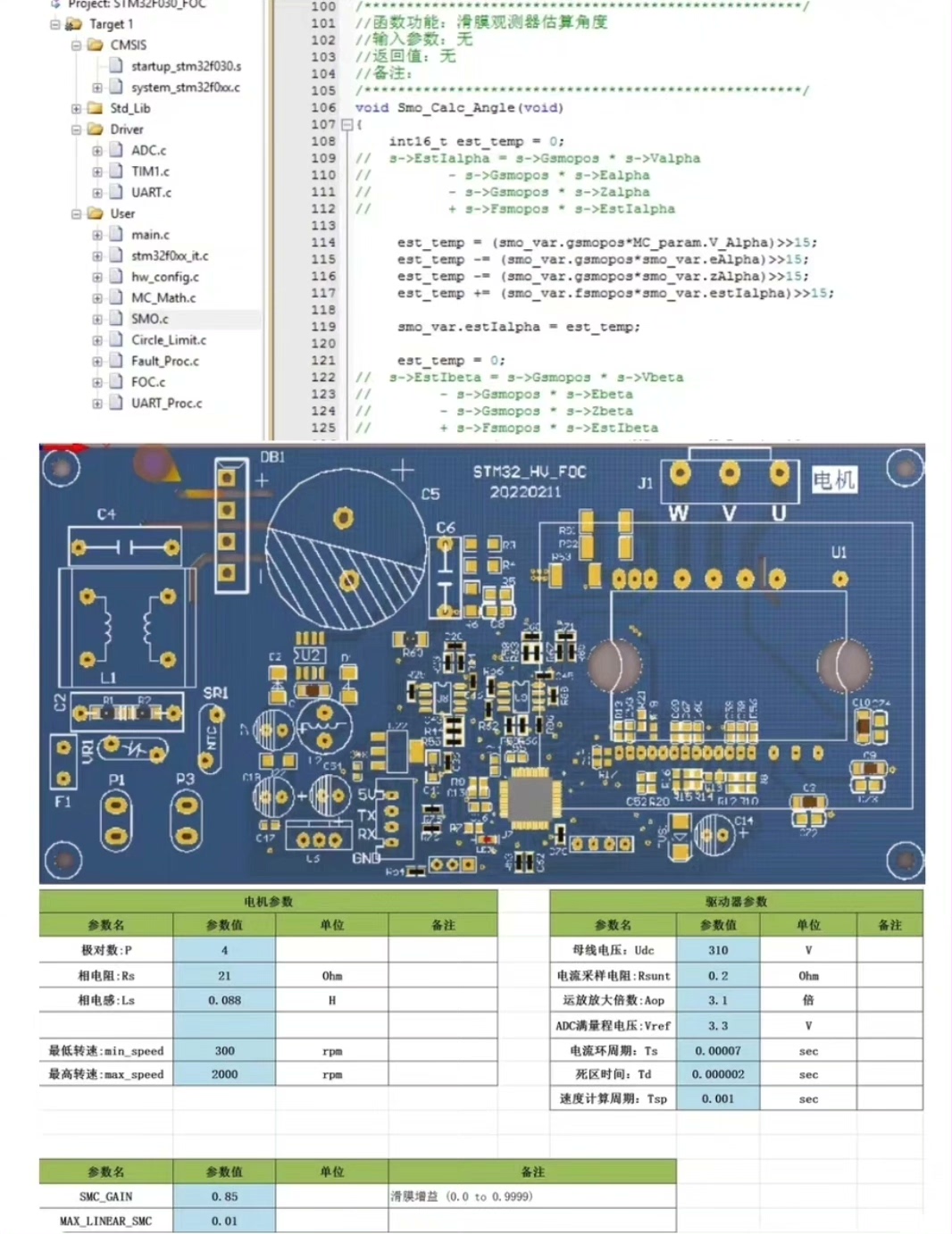
无刷电机控制,高压FOC成熟方案,基于stm32F030,源码 ,非电机库,便于移植。 有过载,过欠压,堵转等保护。 资料包括原理图,PCB,程序 滑膜观测器,电流环计算等。
无刷电机控制一直是嵌入式开发中的一个热门话题,尤其是高压FOC(Field Oriented Control,磁场定向控制)方案,因为它能够提供更高的效率和更精准的控制。最近我基于STM32F030实现了一个无刷电机控制方案,没有使用现成的电机库,而是从头开始搭建,方便后续移植和定制。今天就来聊聊这个项目的实现思路和一些关键代码。
首先,FOC的核心思想是通过将电机的三相电流分解为直轴(d轴)和交轴(q轴)分量,分别控制磁链和转矩。为了实现这一点,我们需要进行坐标变换,包括Clark变换和Park变换。这些变换的代码实现如下:
// Clark变换
void clark_transform(float ia, float ib, float ic, float *ialpha, float *ibeta) {
*ialpha = ia;
*ibeta = (ia + 2 * ib) / sqrt(3);
}
// Park变换
void park_transform(float ialpha, float ibeta, float theta, float *id, float *iq) {
*id = ialpha * cos(theta) + ibeta * sin(theta);
*iq = -ialpha * sin(theta) + ibeta * cos(theta);
}Clark变换将三相电流转换为两相静止坐标系下的α和β分量,而Park变换则将这两个分量转换为旋转坐标系下的d轴和q轴分量。通过这些变换,我们可以更直观地控制电机的磁场和转矩。
接下来是电流环的计算。电流环是FOC控制的核心,它的目的是通过PI控制器调节d轴和q轴的电流,使其达到设定值。这里的关键是PI控制器的实现:
// PI控制器
float pi_controller(float setpoint, float feedback, float kp, float ki, float *integral) {
float error = setpoint - feedback;
*integral += error;
return kp * error + ki * (*integral);
}PI控制器通过比例和积分环节来调节输出,确保电流能够快速、稳定地达到设定值。在实际应用中,我们需要根据电机的特性调整kp和ki参数,以达到最佳的控制效果。
当然,电机控制不仅仅是算法的问题,还需要考虑各种保护机制。在这个项目中,我实现了过载、过欠压和堵转保护。过载保护通过检测电流来判断,如果电流超过设定值,系统会立即停止电机运行。过欠压保护则是通过检测电源电压来实现的,确保电机在安全的电压范围内工作。堵转保护则是通过检测电机转速来判断,如果转速过低,系统会认为电机处于堵转状态,并采取相应的措施。
// 过载保护
void overload_protection(float current) {
if (current > MAX_CURRENT) {
stop_motor();
}
}
// 过欠压保护
void voltage_protection(float voltage) {
if (voltage < MIN_VOLTAGE || voltage > MAX_VOLTAGE) {
stop_motor();
}
}
// 堵转保护
void stall_protection(float speed) {
if (speed < MIN_SPEED) {
stop_motor();
}
}最后,关于滑膜观测器(Sliding Mode Observer,SMO),它是一种用于无传感器控制的技术,通过观测电机的反电动势来估计转子位置和速度。滑膜观测器的实现比较复杂,但它的核心思想是通过一个滑膜面来快速收敛到实际值。这里就不展开详细代码了,有兴趣的朋友可以深入研究一下。
整个项目的资料包括原理图、PCB和程序源码,都已经开源,大家可以自行下载和修改。这个方案的最大优点是便于移植,因为它没有依赖特定的电机库,所有的代码都是从头实现的,适合各种不同的硬件平台。
总的来说,无刷电机控制是一个非常有挑战性的领域,但通过合理的算法设计和保护机制,我们可以实现高效、稳定的控制。希望这篇文章能给大家带来一些启发,也欢迎大家在评论区交流讨论。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)