1.3永磁同步电机——模型预测转矩控制(MPTC)
模型可上闲鱼(蓝云07)购买,可提供模型定制与答疑服务~永磁同步电机模型预测转矩控制的核心其实就是通过欧拉公式(或其他预测公式)进行预测,通过当前电机状态量(电流值、角度值、转速值等)及将要作用的电压矢量预估下一时刻电机状态量。通过代价函数判断哪个电压矢量使得预估转矩值、磁链值与预期转矩值、磁链值相差最小便是最优电压矢量,也即此时刻选择作用在电机上的电压矢量。
概要
永磁同步电机模型预测转矩控制的核心其实就是通过欧拉公式(或其他预测公式)进行预测,通过当前电机状态量(电流值、角度值、转速值等)及将要作用的电压矢量预估下一时刻电机状态量。通过代价函数判断哪个电压矢量使得预估转矩值、磁链值与预期转矩值、磁链值相差最小便是最优电压矢量,也即此时刻选择作用在电机上的电压矢量。
模型可上闲鱼(蓝云07)购买,可提供模型定制与答疑服务~
一、有限电压矢量控制集
主流的PMSM驱动拓扑结构为两电平电压型三相逆变电路(Voltage Source Inverter,VSI),其构造简单,易于实现波形调制,且噪声低、效率高,如下图。
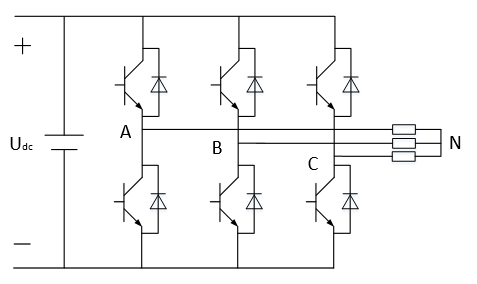
图中,VSI共有6个开关器件,分为上桥臂与下桥臂,两者不能同时导通。定义三相桥臂的开关状态为 Sa 、 Sb 、 Sc 。若 Sa 、 Sb 、 Sc 为1,则表示上桥臂导通,下桥臂关断;反之,则上桥臂关断,下桥臂导通。由此可见共有8种开关状态组合,也即对应着8个基本电压矢量。
分析VSI的电路结构图,可得三相相电压与开关状态量之间的关系为
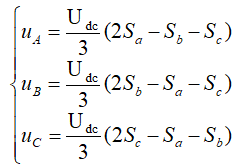
为何是这个公式呢?我们可以Sa=1 、 Sb=0 、 Sc=0 的情况来分析:
此时A相上桥臂导通,B、C相下桥臂导通,因此电路图可以简化为下图。
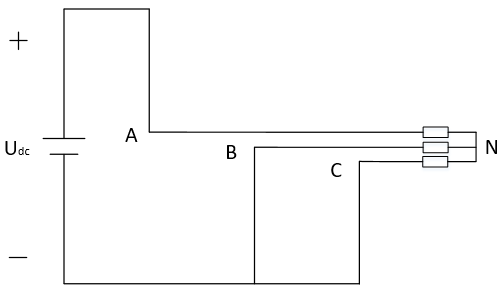
从这张电路图便可简单地分析得到A相电压为 2Udc/3 ,B、C两相电压为 −Udc/3 ,符合前述公式。
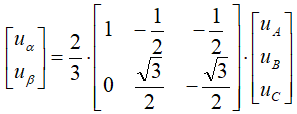
为能够直观地在复平面上表示8个基本矢量,应将上式转化到静止坐标系中,其关系为
结合上述公式,将8种开关状态量带入,可得下表。
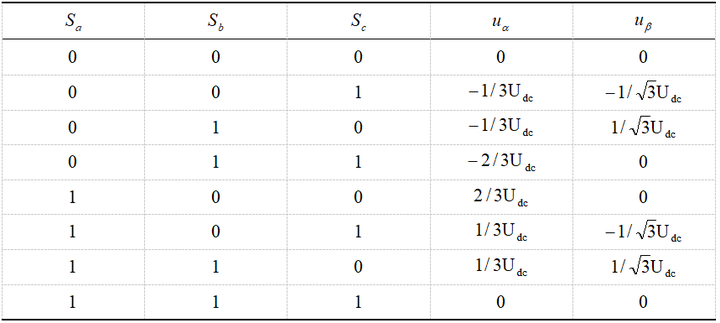
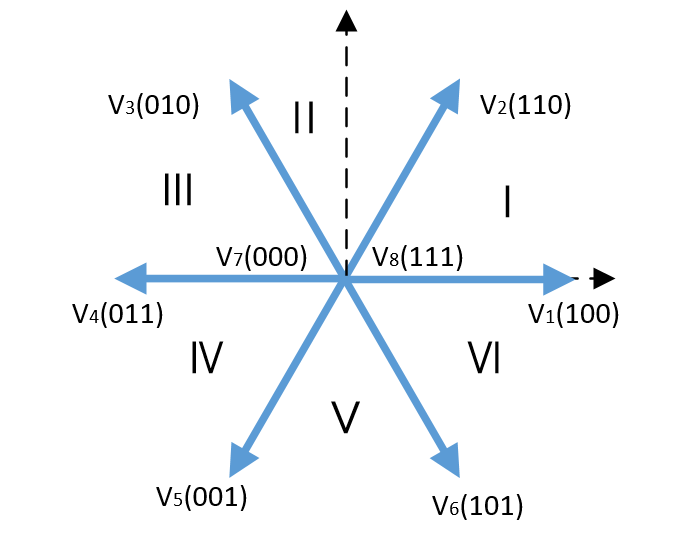
通过上表,可知有限电压矢量控制集共有6个有效矢量,2个零矢量。通过这8个固定幅值及相角的电压矢量,可控制PMSM的转矩及磁链增减,其可在复平面描绘为下图,8个基本矢量可将平面划分为6个扇区。
二、模型预测转矩控制原理
2.1预测模型
在理想条件下,PMSM数学模型为
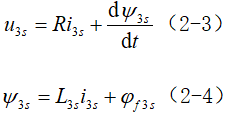
其中 u3s 、 i3s 分别为三相定子电压、电流; R 、 L3s 分别为三相绕组的电阻、电感; ψ3s 、 φf3s 分别为三相定子磁链、转子磁链。
为方便分析,对定子电流进行解耦,因此将式(2-3)~(2-4)转化到旋转坐标系下为
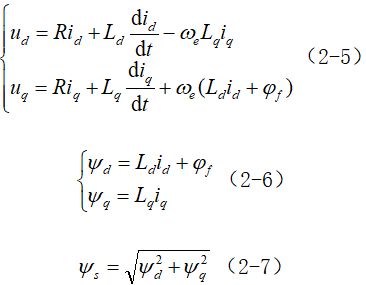
其中 ud 、 uq 、 id 、 iq 分别为 d 、 q 轴电压、电流; Ld 、 Lq 、 R 分别为d 、 q 轴电感、电阻; ψd 、 ψq 、 ψs 、 φf 分别为d 、 q轴定子磁链、总定子磁链、转子磁链; ωe 为电角速度。
对式(2-5)进行变换,得到电流微分与电压关系为
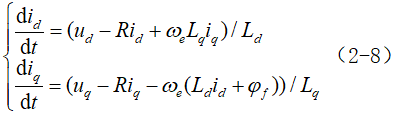
数字系统中,都为离散化分析,因此对式(2-8)利用欧拉公式进行离散化为
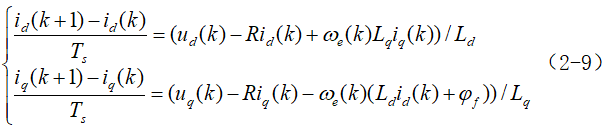
通过式(2-9),便可利用当前k时刻的状态量,预测出k+1时刻的电流量。从而,计算出k+1时刻的转矩及磁链值。
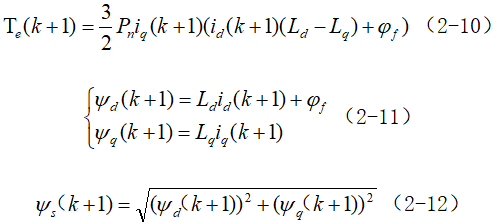
式(2-10)~(2-12)便是PMSM模型预测转矩控制的预测模型。
2.2代价函数
为了能使PMSM转速能保持恒定,并且将控制量转化为转矩及磁链,应当通过负反馈调节转速,PI控制器将转速误差转化为转矩及磁链的预期值,则转矩预期值为

式中, Kp 、 Ki 分别为控制器的比例系数、积分系数。
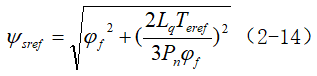
本文采用表贴式电机( Ld=Lq )用于仿真,因此可令 id=0 。此时磁通完全由永磁体提供, iq 用于控制电机转矩。结合式(2-6)、(2-7)、(2-10),可得定子磁链预期值为
知晓转矩及磁链预期值,且已预测出k+1时刻转矩及磁链值,便可构建代价函数,以此来评估矢量作用。
![]()
其中 λ 为权重系数,用以权衡转矩及磁链的重要性。
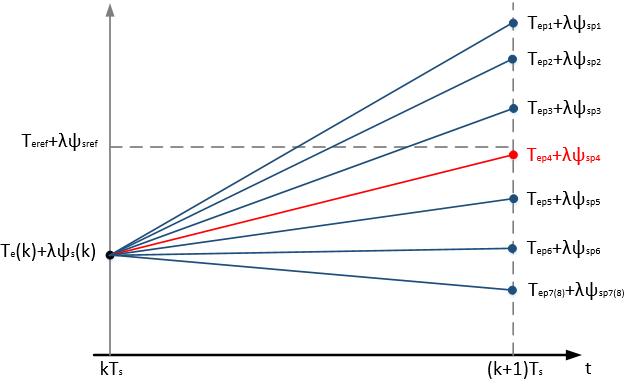
依据代价函数及式(2-10)~(2-12),可分析8个基本电压矢量在同一时刻,将对下一时刻转矩及磁链输出产生不同的影响。最优矢量的选择,便是使得k+1时刻转矩 Te(k+1) 最接近 Teref ,磁链 ψs(k+1) 最接近 ψsref 。但两者往往是无法同时实现的,因此需权重系数来衡量两者的优先级。
权重系数的选取依赖于人工整定,初始值可假定为转矩额定值与转子磁链的比值( λ=TN/φf ),在此基础上调节,观察转矩磁链波动。
2.3延时补偿
在数字控制系统中是不可能完成瞬时计算的,并且控制周期 Ts 越小,理论上来说转矩及磁链的波动越小,不过这也意味着需要更快的计算速度,在一个控制周期内给出最优矢量开关组合。
因此进行延时补偿是十分必要的,这能避免k时刻计算得到的最优开关组合不在当前时刻作用于电机,从而产生不必要的转矩磁链脉动。
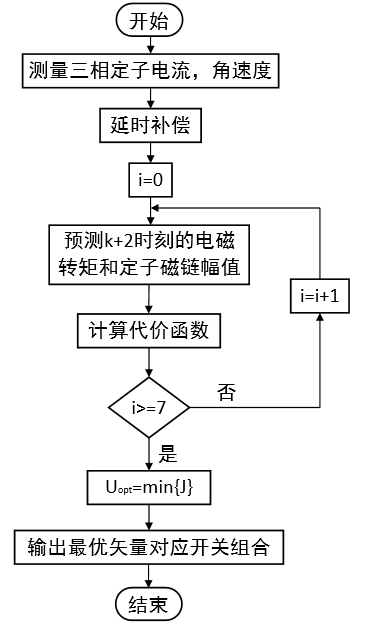
延时补偿要求在k时刻预测出k+1时刻的状态量,利用此状态量,预测出k+2时刻转矩及磁链值,从而通过代价函数筛选出最优矢量。
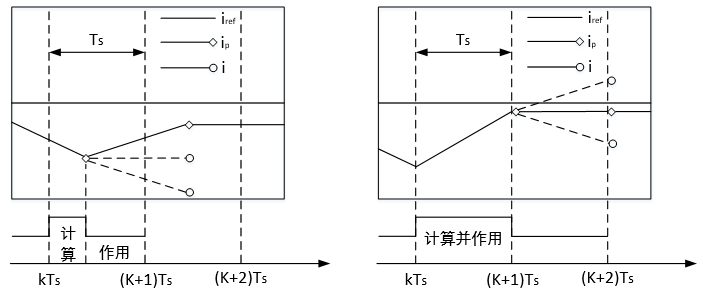
上图左图为无延时无补偿,右图为延时补偿。观察左图,在无延时无补偿的情况下,k时刻的状态预估需要一定时间,继而延续上一时刻状态运行。等到计算完毕时,系统状态已经发生改变,此时选取的矢量并非是当前时刻的最优,势必会带来不良影响。
而右图加入延时补偿后,下一时刻计算及当前时刻输出同时进行,可瞬间输出最优计算结果。
据上述所言,新的预测模型应为

其中,因为机械运动在极小的时间内可视为不变,所以可近似认为 ωe(k+1)=ωe(k)
已知直、交轴电流,根据式(2-10)~(2-12),可得到k+2时刻的转矩及磁链,便可设计新的代价函数为
![]()
2.4控制结构及流程
三、仿真搭建
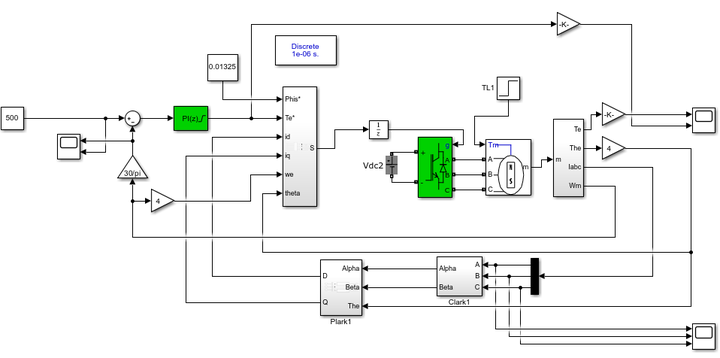
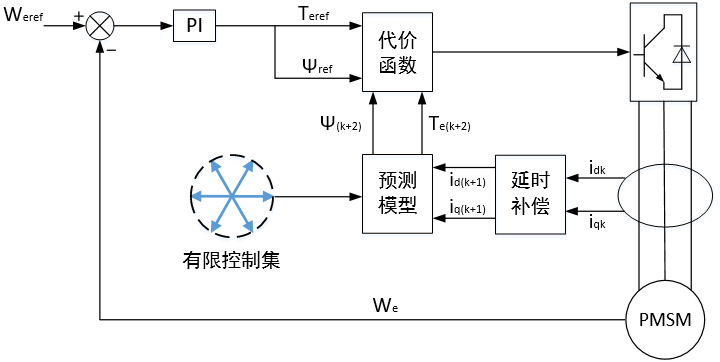
这便是永磁同步电机模型预测转矩控制的仿真图,这里是给了固定的 ψsref ,也是可以的,也即没有考虑退磁效应。

这一块,通过PI控制器,将转速误差转化为转矩预期值,实现闭环控制。注意 n=30ω/π 。
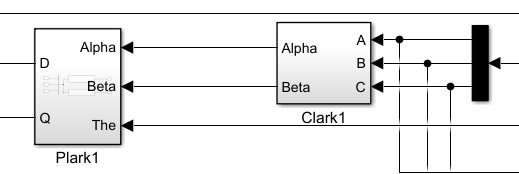
这一块,通过clark,park变换,将三相A、B、C电流值转化为旋转坐标系id 、 iq 。
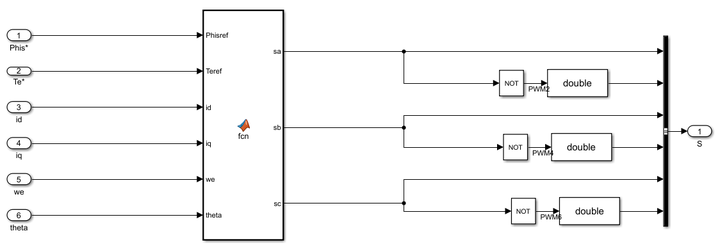
这便是控制算法过程,通过Matlab Function编写算法,输出合适的开关状态组合Sa 、 Sb 、 Sc。
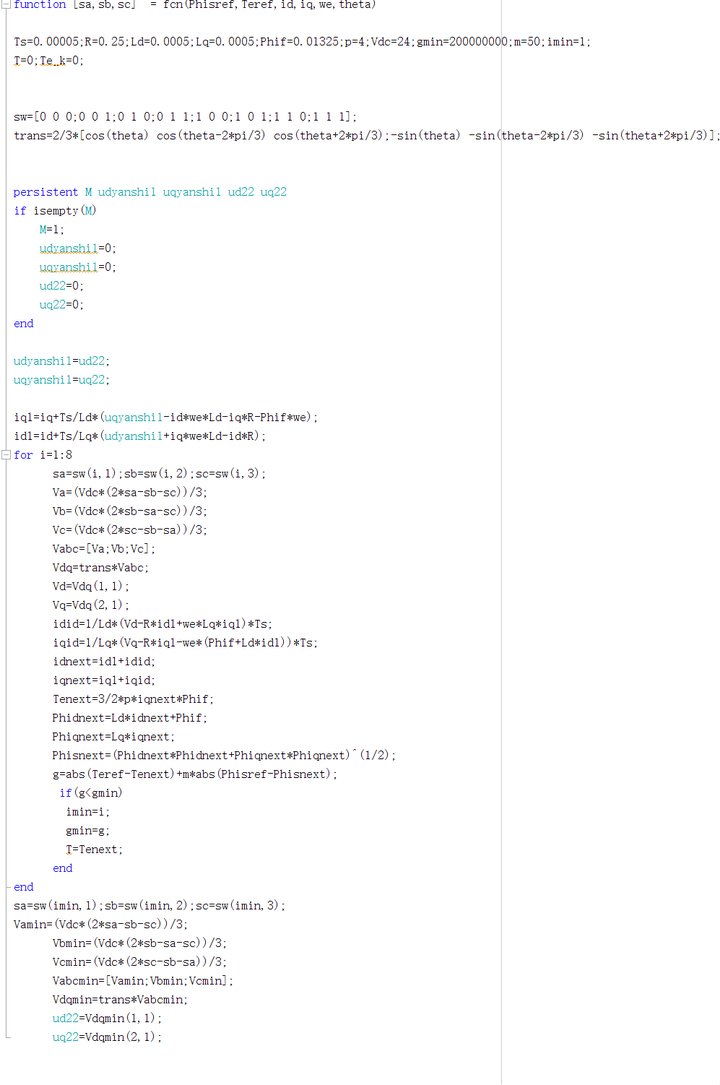
以上便是算法,也就是把前面讲的预测评估过程,用程序表示一下而已。
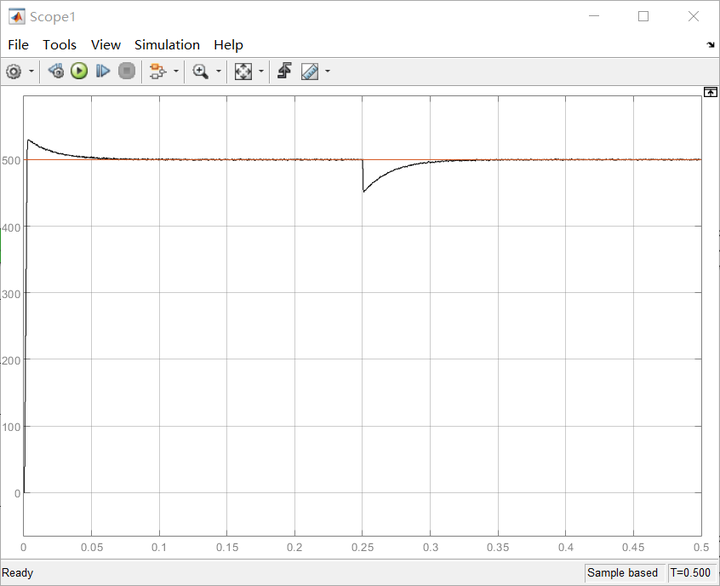
转速图
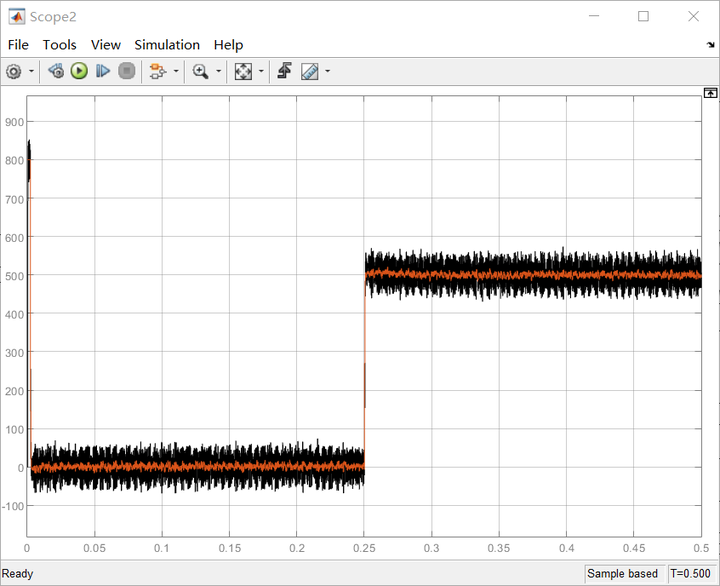
转矩图
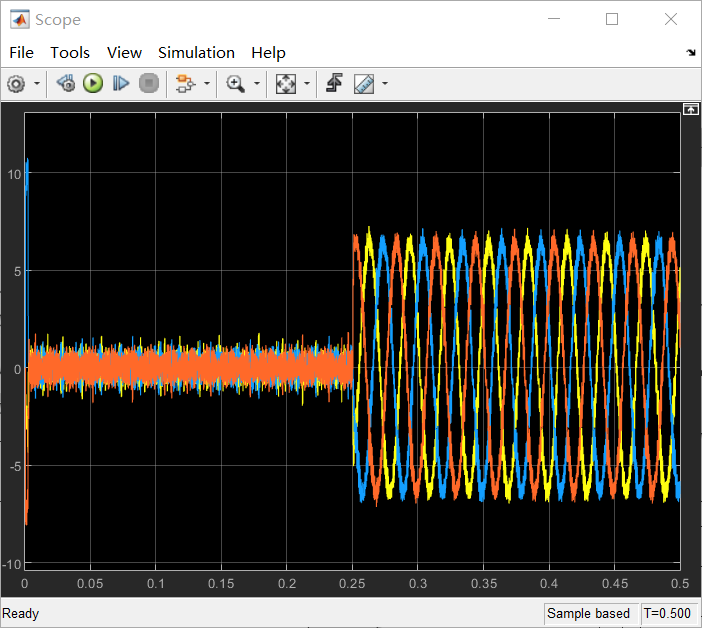
三相电流图
四、结语
上述内容详细讲解了模型预测转矩控制的实现思路。大家点点收藏的同时,麻烦点点赞同哦,谢谢!若需要此模型,可上闲鱼(蓝云07)购买。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 11
11 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)