GD32F4系列FreeRTOS 移植
本文详细介绍了FreeRTOS实时操作系统在嵌入式开发中的移植过程。主要内容包括:移植前的硬件/软件环境准备、FreeRTOS源码结构解析(重点关注portable目录)、核心移植步骤(添加源码、配置头文件路径、修改配置文件等)、底层接口实现方法,以及通过创建任务进行移植测试。文章还总结了常见问题排查方法,指出移植关键在于适配硬件架构和正确配置内核参数,为嵌入式开发者提供了实用的FreeRTOS移
在嵌入式开发中,实时操作系统(RTOS)能有效简化多任务管理、提升系统响应速度,而 FreeRTOS 作为轻量、开源的 RTOS,被广泛应用于各类 MCU 平台。本文将以通用步骤为例,详细讲解 FreeRTOS 的移植过程,适合有一定嵌入式基础的开发者参考。
一、移植前的准备工作
移植 FreeRTOS 的核心是让其适配目标 MCU 的架构和硬件环境,因此前期准备需明确 “目标平台” 和 “工具链” 两大要素。
1. 硬件环境
- 目标 MCU:需明确芯片架构(如 ARM Cortex-M3/M4、RISC-V、STM8 等),以 Cortex-M4 为例(本次使用的是GD32F407);
- 开发板:包含目标 MCU 的最小系统板(需有电源、复位、调试接口);
- 调试工具:J-Link、ST-Link 等(用于下载程序和调试)。
2. 软件环境
- 集成开发环境(IDE):如Keil MDK;
- 编译器:需与 IDE 匹配( Keil 自带的 ARMCC);
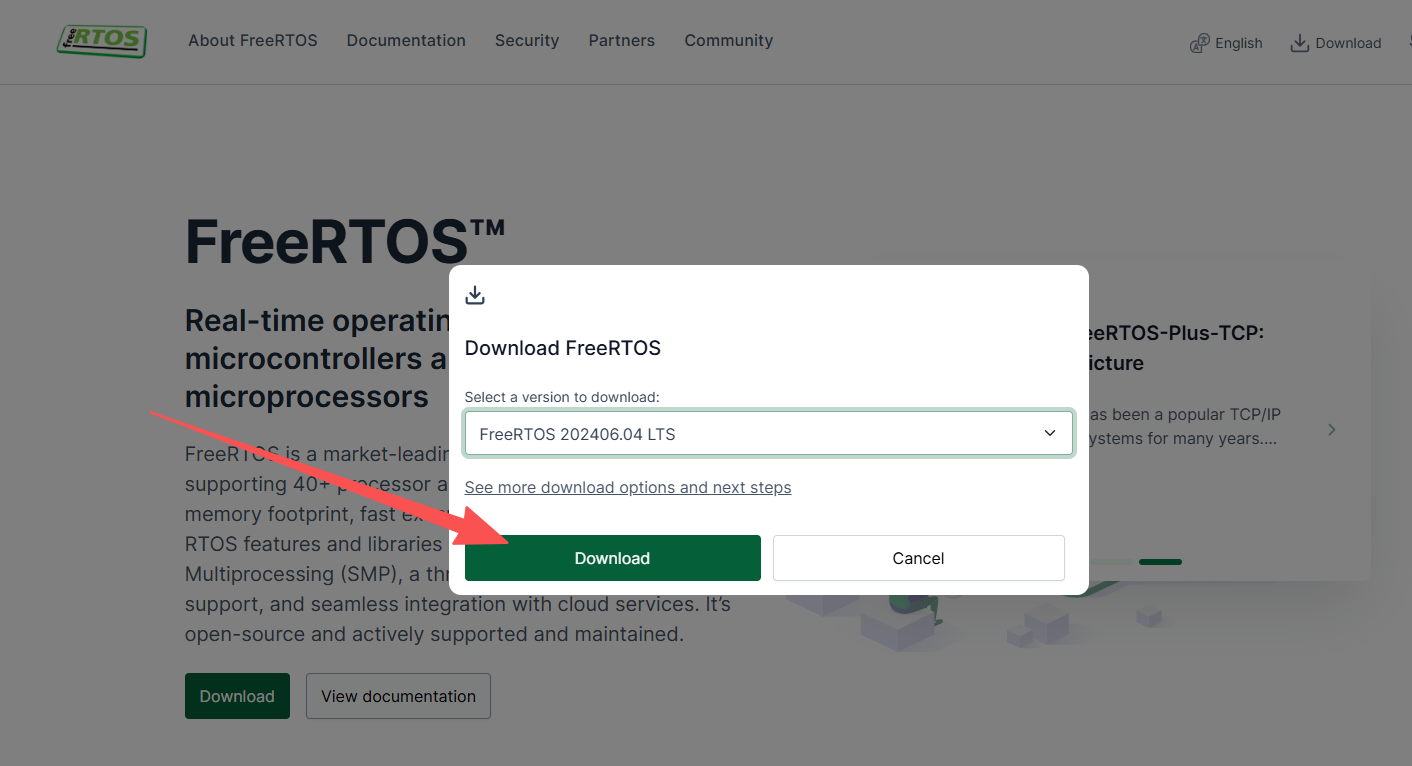
- FreeRTOS 源码:从官网(https://www.freertos.org/)下载最新版本(建议选择 LTS 长期支持版);
- 目标 MCU 的底层驱动:如 STM32 的 HAL 库或标准外设库(用于初始化时钟、GPIO 等硬件)。
二、FreeRTOS 源码结构解析
移植前需理清 FreeRTOS 的源码组成,核心文件可分为 “通用内核” 和 “平台相关” 两部分:
FreeRTOS/
├─ include/ // 通用头文件(内核API、数据结构等,所有平台共用)
├─ src/ // 通用内核源码(任务调度、队列、信号量等,所有平台共用)
└─ portable/ // 平台相关代码(需根据目标MCU修改)
├─ [Compiler]/ // 编译器相关(如ARMCC、GCC)
└─ [Architecture]/ // 架构相关(如ARM_CM4F对应Cortex-M4带FPU)
关键:移植只需修改portable目录下的平台相关文件,通用内核代码无需改动。
三、移植核心步骤
步骤 1:下载好源码
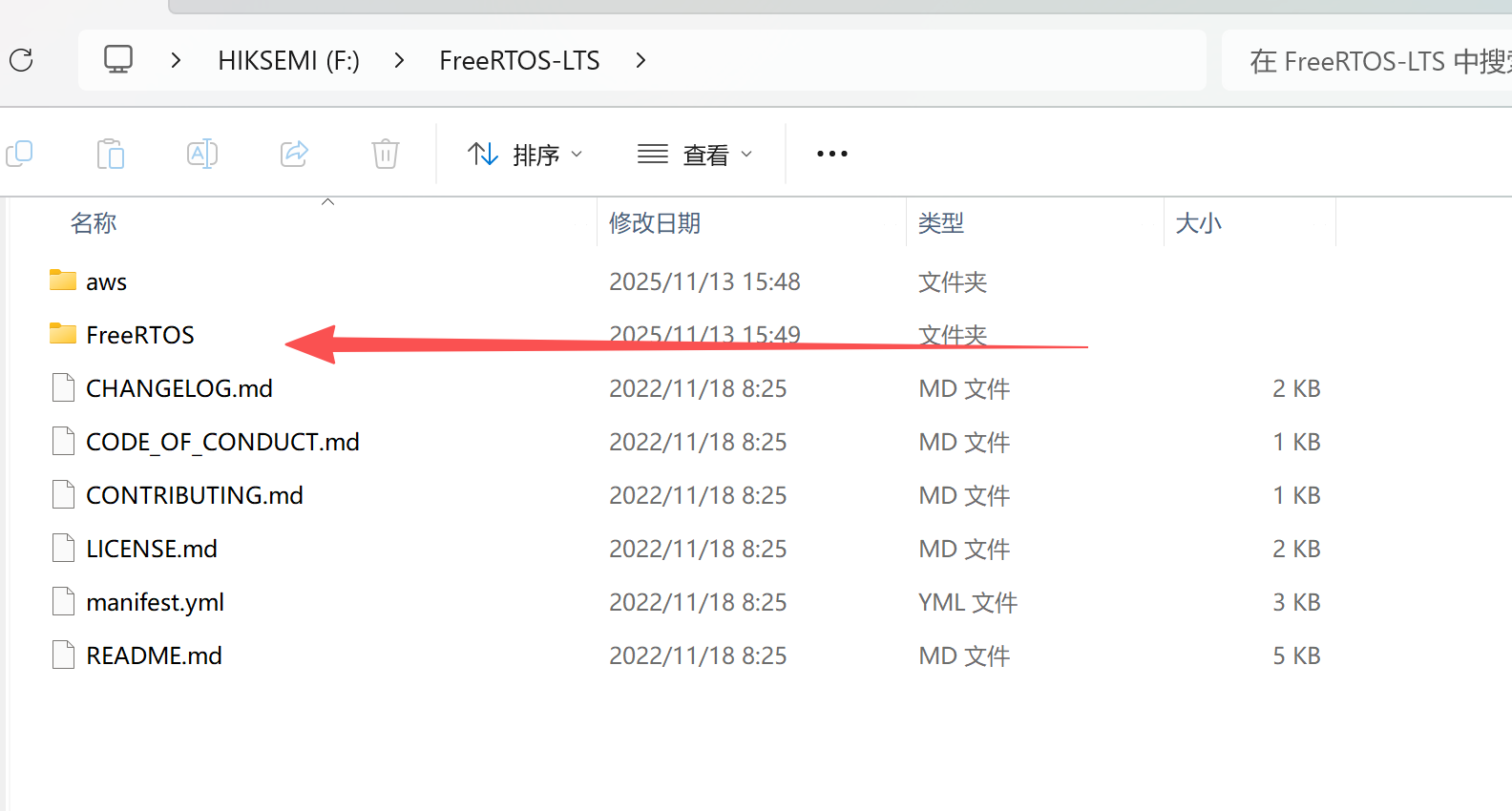
然后咱们只需要选择这个FreeRTOS 这个里边的代码
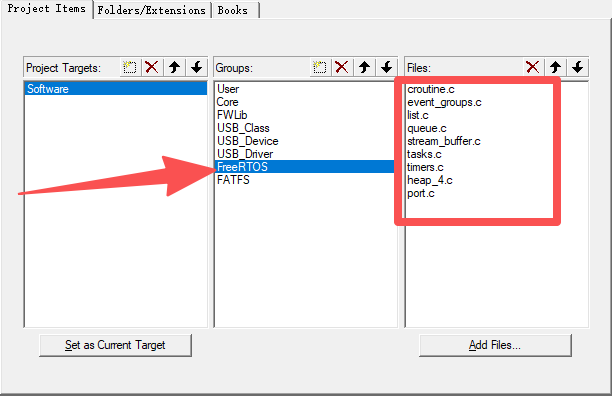
步骤 2:添加 FreeRTOS 源码到工程
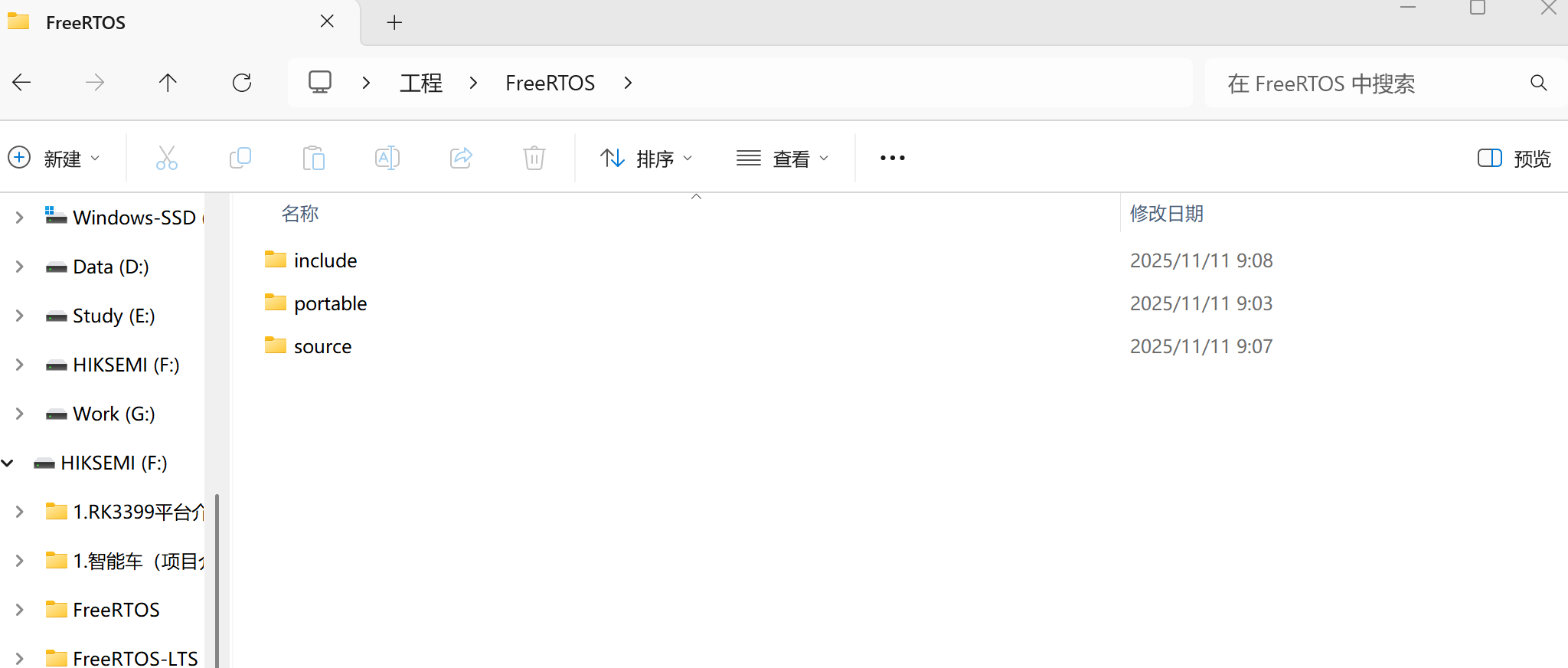
- 复制 FreeRTOS 源码到工程目录,建议新建
FreeRTOS文件夹,包含include、src、portable; - 在 IDE 中添加文件:
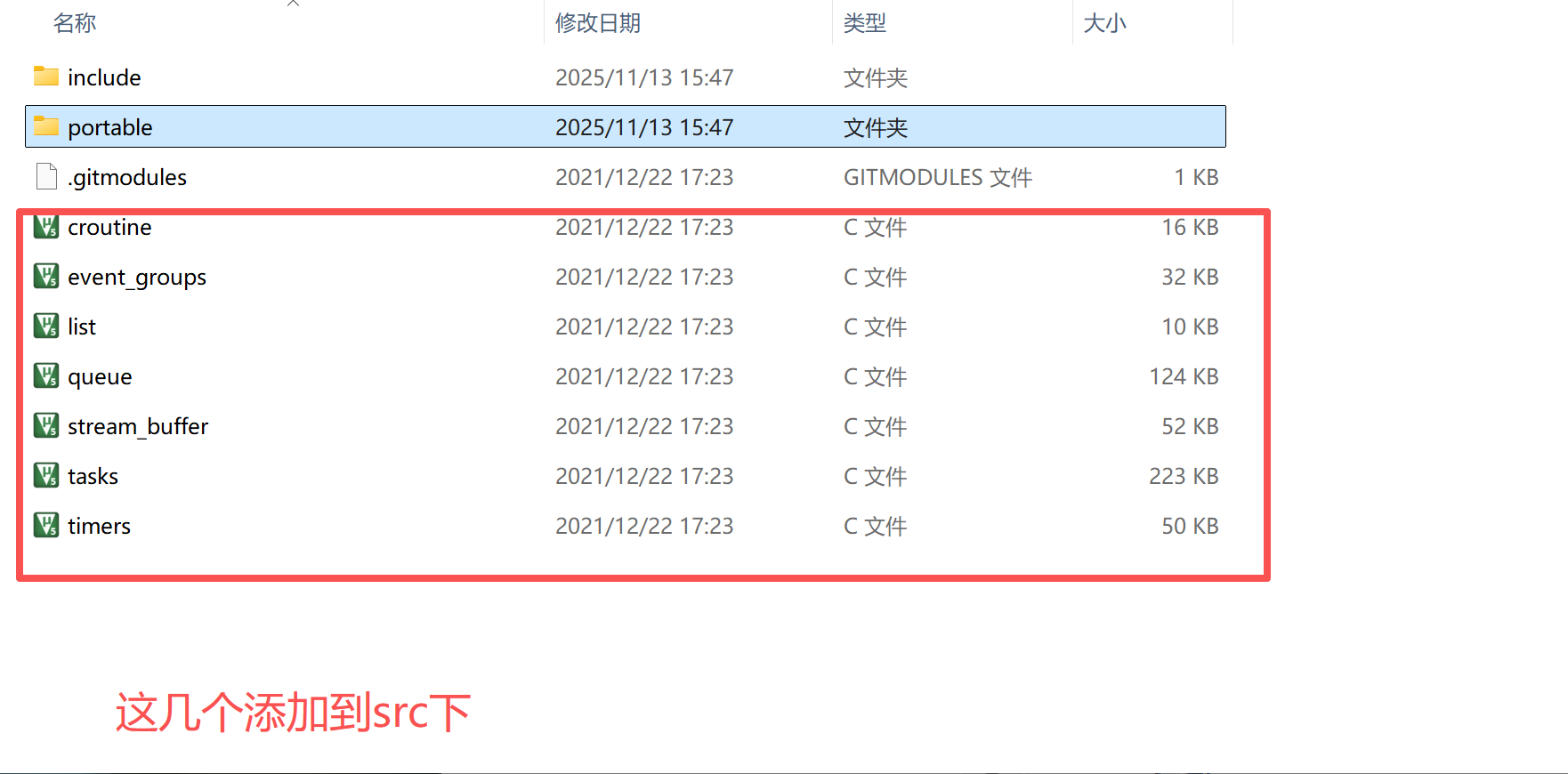
- 通用内核:添加
src目录下所有.c文件(port.c除外,它属于平台相关); - 平台相关:根据 MCU 架构和编译器,从
portable中选择对应文件(如 Cortex-M4 + Keil,需添加portable/ARMCC/ARM_CM4F/port.c); - 内存管理:从
portable/MemMang中选择一个内存管理文件(新手推荐heap_4.c,支持动态内存分配且无碎片)。
- 通用内核:添加
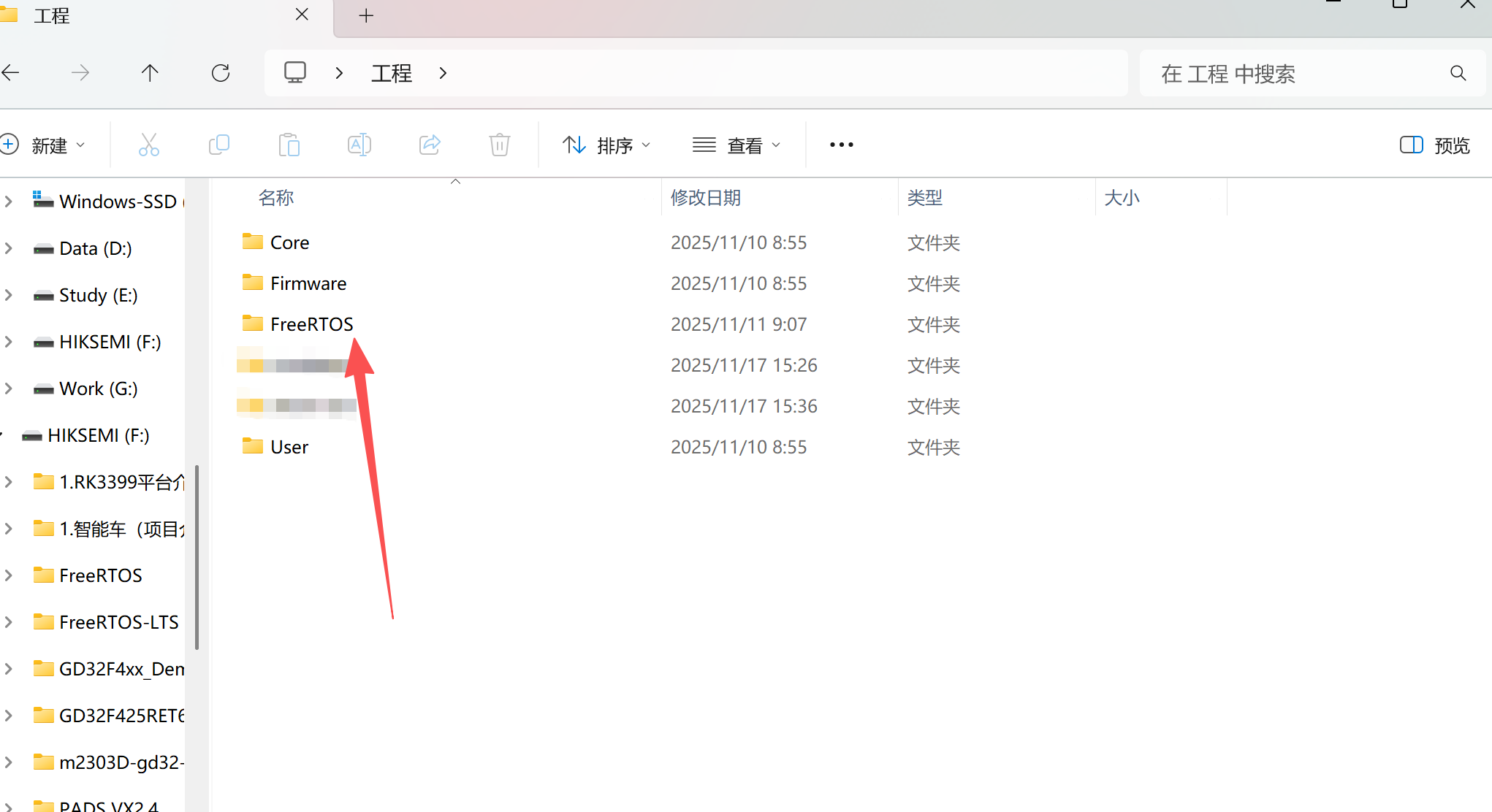
把这个文件复制到工程文档下边然后在里边创建下面这三个文件夹
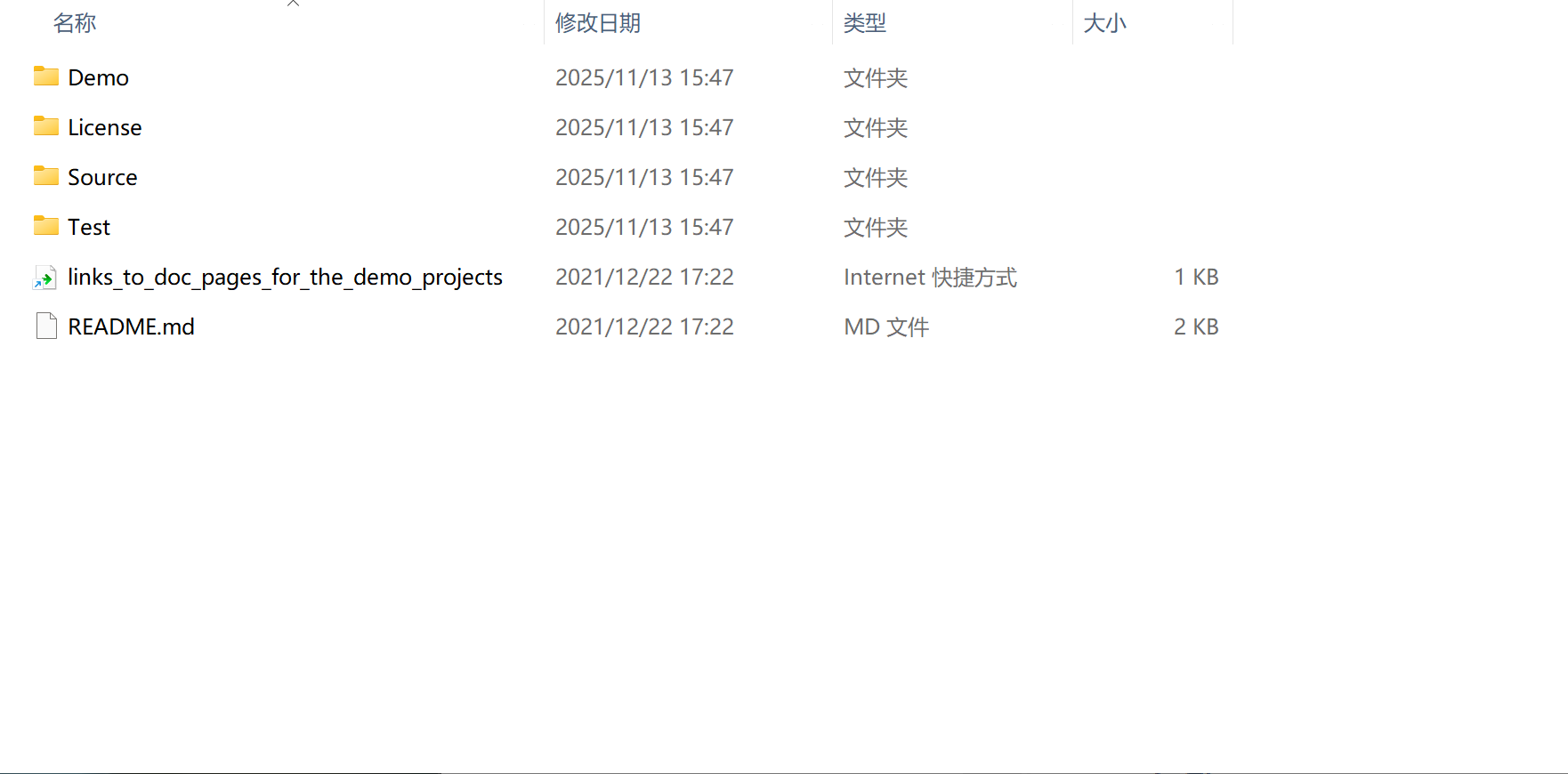
然后打开这个文件后将红框里边的内容放到新建立的source中
打开portable后删除所有的就留下下边的这几个,然后复制到咱们创建的portable中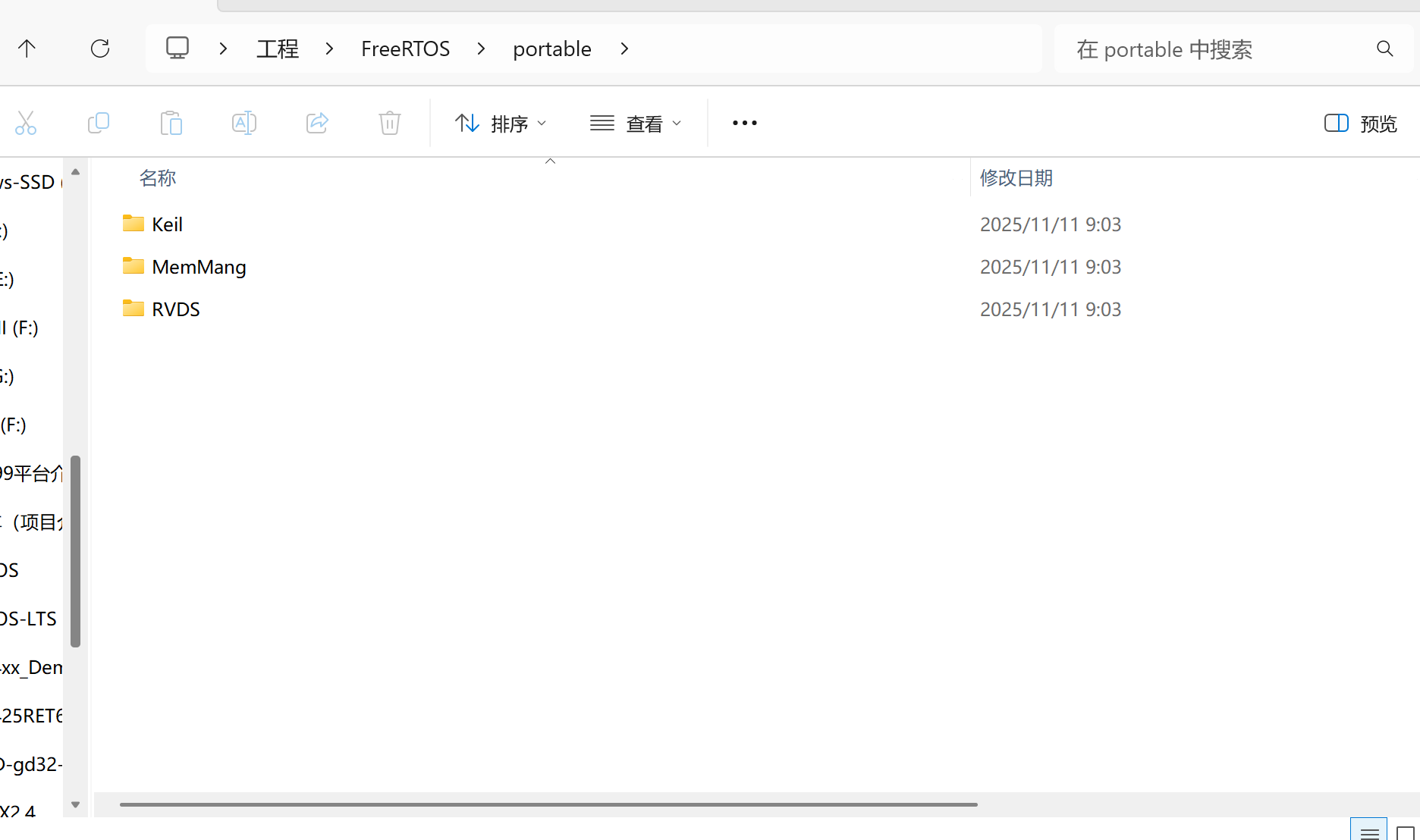
同样的将文件夹下边的include里边的复制到新建的include文件夹下边
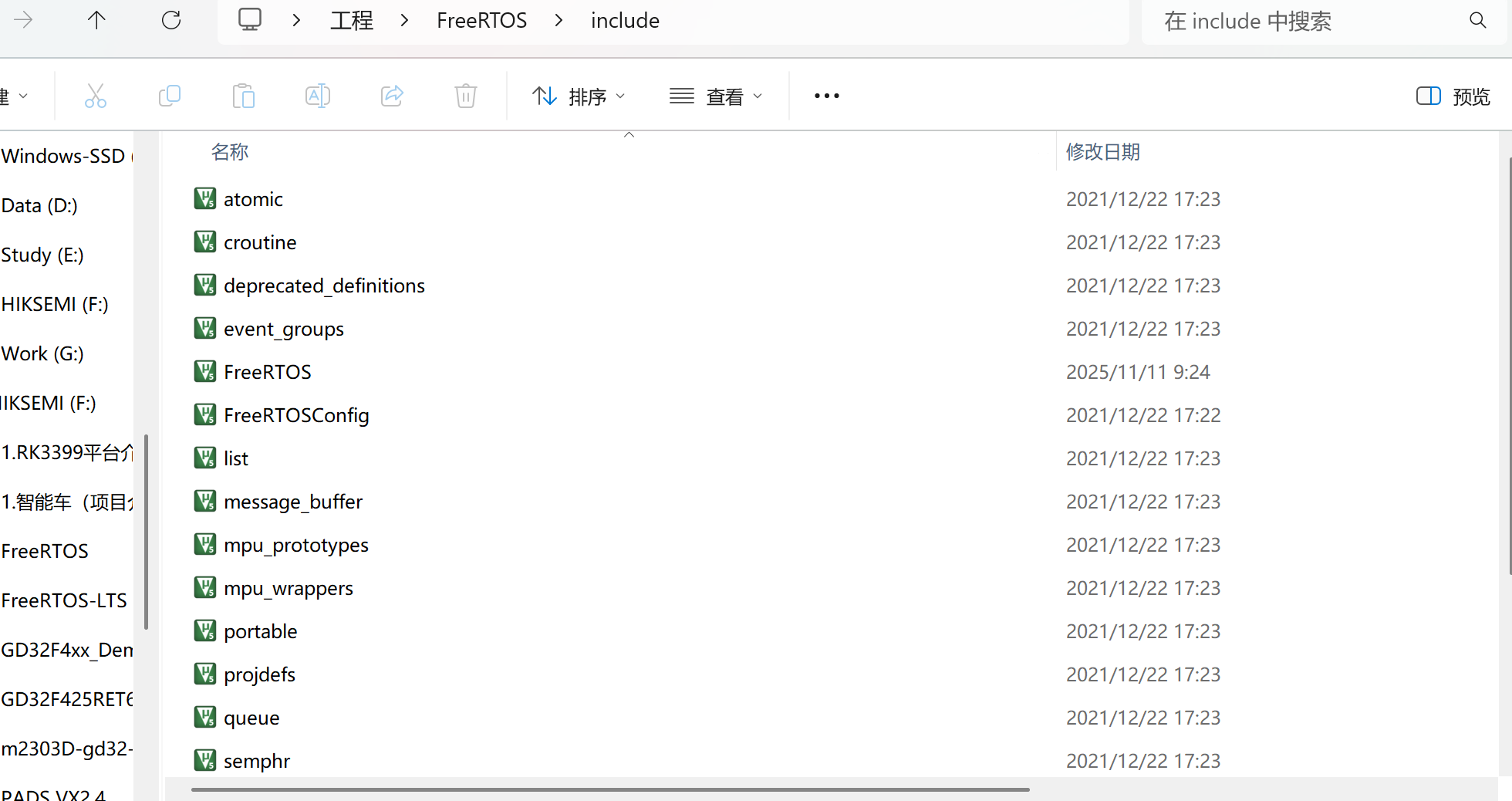
然后去demo里边找到我们使用系列的Cortex-M4的FreeRTOSConfig.h文件把他放到我们新建的include文件夹下边
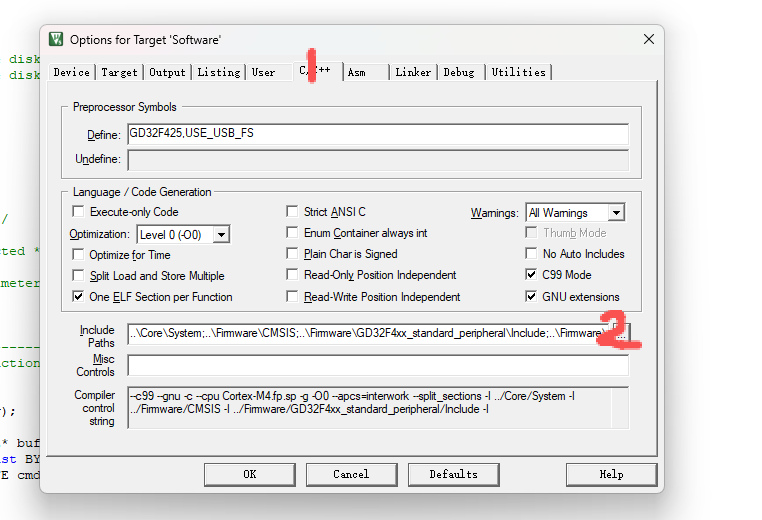
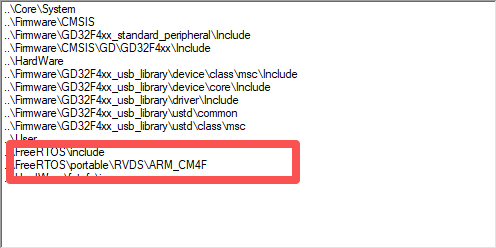
步骤 3:配置头文件路径,添加到编译器中
在 IDE 中设置头文件搜索路径,确保编译器能找到:
FreeRTOS/include- 平台相关头文件路径(如
portable/ARMCC/ARM_CM4F) - 目标 MCU 的底层驱动头文件
-
把这些内容添加进来
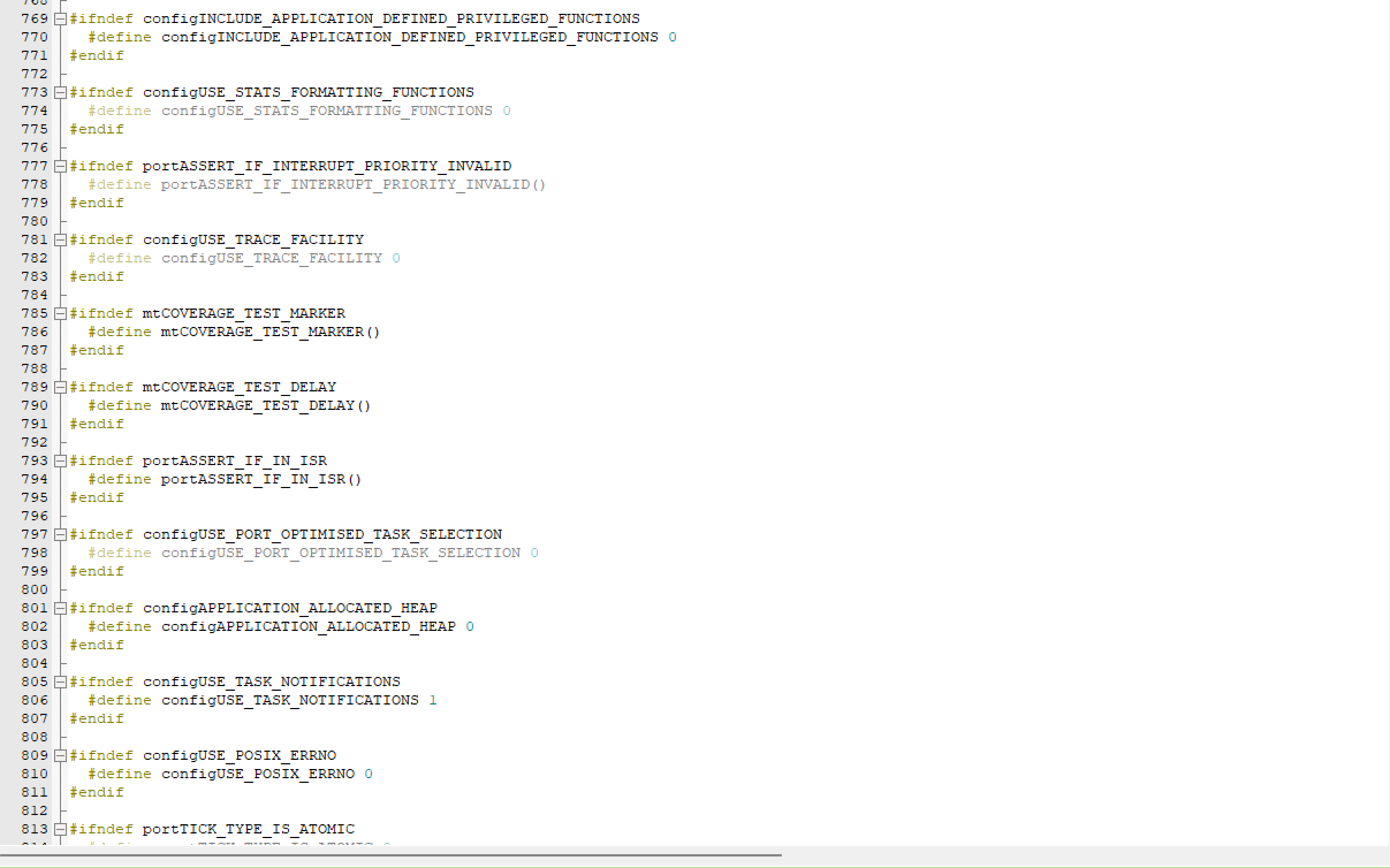
步骤 4:修改 FreeRTOSConfig.h 配置文件
这是移植的核心配置文件,需根据目标平台定制,主要配置项如下:
// 1. 系统时钟配置
#define configCPU_CLOCK_HZ (SystemCoreClock) // 系统时钟频率(从底层驱动获取)
#define configTICK_RATE_HZ ((TickType_t)1000) // 时钟节拍频率(1ms一次滴答)
// 2. 任务配置
#define configMAX_PRIORITIES (5) // 最大任务优先级
#define configMINIMAL_STACK_SIZE ((unsigned short)128) // 最小任务栈大小(字)
// 3. 内核功能开关
#define configUSE_PREEMPTION 1 // 启用抢占式调度
#define configUSE_TICKLESS_IDLE 0 // 关闭低功耗模式(初期调试用)
#define configUSE_QUEUE_SETS 0 // 按需启用队列集
// 4. 中断配置(Cortex-M系列关键)
#define configPRIO_BITS 4 // 优先级位数(如STM32为4位)
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15 // 最低中断优先级
#define configKERNEL_INTERRUPT_PRIORITY (configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS))
// 5. 钩子函数(调试用)
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
// 6. 类型重定义(适配编译器)
#define portTickType TickType_t
#define portBASE_TYPE long
注意:中断优先级配置需与 MCU 的 NVIC 设置一致,FreeRTOS 的内核中断(如 PendSV、SVC)需设置为最低优先级。
步骤 5:实现底层接口(关键)
FreeRTOS 依赖两个核心硬件接口,需根据 MCU 架构实现:
-
时钟节拍(Tick)中断用于触发任务调度,通常通过 SysTick 定时器实现。在 Cortex-M 中,需在
stm32f4xx_it.c(中断服务函数文件)中添加: -
任务上下文切换由 PendSV(用于任务切换)和 SVC(用于任务创建)中断实现,Cortex-M 的
port.c已封装好汇编代码,无需修改,但需确保中断向量表中正确映射这两个中断。
四、移植测试:创建第一个任务
移植完成后,编写测试代码验证是否成功:
#include "FreeRTOS.h"
#include "task.h"
#include "stm32f4xx_hal.h"
// 任务1:LED1每500ms闪烁一次
void vTask1(void *pvParameters) {
while (1) {
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_0); // 假设LED接PB0
vTaskDelay(pdMS_TO_TICKS(500));
}
}
// 任务2:LED2每1000ms闪烁一次
void vTask2(void *pvParameters) {
while (1) {
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1); // 假设LED接PB1
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
int main(void) {
// 初始化硬件(时钟、GPIO等)
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
// 创建任务
xTaskCreate(vTask1, "Task1", 128, NULL, 1, NULL);
xTaskCreate(vTask2, "Task2", 128, NULL, 1, NULL);
// 启动调度器
vTaskStartScheduler();
// 若调度器启动失败,程序会走到这里
while (1) {}
}
五、常见问题与排查
-
程序无法运行,进入 HardFault
- 检查栈大小:
configMINIMAL_STACK_SIZE是否过小,任务栈不足会导致栈溢出; - 中断优先级:确保 FreeRTOS 内核中断(PendSV、SVC)优先级最低。
- 检查栈大小:
-
任务不切换
- 检查 SysTick 配置:
configCPU_CLOCK_HZ是否与实际系统时钟一致; - 确认
vTaskStartScheduler()已调用,且无内存分配失败(heap_4.c需足够堆空间)。
- 检查 SysTick 配置:
-
调试时无法单步任务
- 检查 IDE 的调试配置,确保 “Use microLIB” 已勾选,避免标准库与 FreeRTOS 冲突。
六、总结
FreeRTOS 移植的核心是 “适配硬件架构” 和 “正确配置内核参数”,关键步骤可概括为:
- 搭建工程验证硬件;
- 添加源码并配置路径;
- 定制
FreeRTOSConfig.h; - 实现时钟节拍和上下文切换接口;

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)