Simulink在DSP2833x系列上的模型设计:电机控制与通讯应用的自动代码生成
就拿最常见的LED闪烁来说,在Simulink里拖个GPIO模块,设置下28335的GPIO34引脚,勾选PWM触发模式。总的来说,Simulink+28335的组合把嵌入式开发的门槛拉低了好几个level,特别是做复杂控制算法时,可视化建模比纯代码调试直观太多了。内容为Simulink在嵌入式领域的应用,具体是Simulink在DSP28335这块开发版上的应用模型:包括直流电机、PMSM、步进
DSP2833x系列基于模型的控制器设计 Simulik自动生成代码 DSP2833x基于模型的电机控制设计 MATLAb Simulik自动生成代码 基于dsp2833x 底层驱动库的自动代码生成 MATLAB Simulink仿真及代码生成技术入门教程 内容为Simulink在嵌入式领域的应用,具体是Simulink在DSP28335这块开发版上的应用模型:包括直流电机、PMSM、步进电机控制模型,还有常见的LED、串口、CAN、Spi、i2c等通讯相关Simulink模型及代码生成
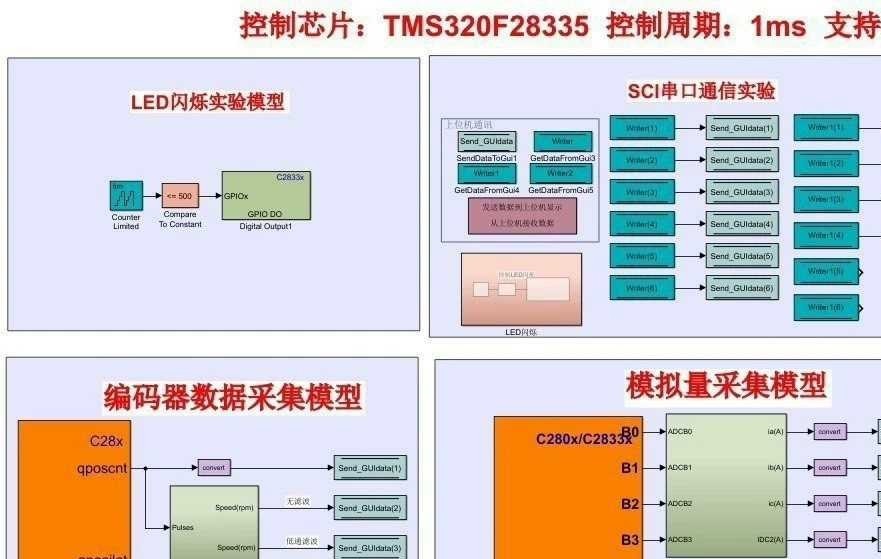
玩转DSP2833x的工程师都知道,手动敲寄存器这事儿吧,费劲不说还容易翻车。现在咱们直接拿Simulink搭积木,自动生成能烧录的C代码,真香!就拿最常见的LED闪烁来说,在Simulink里拖个GPIO模块,设置下28335的GPIO34引脚,勾选PWM触发模式。这时候生成的代码里会自动带出InitGpio()函数,咱们瞅一眼关键部分:
GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; // 设置为GPIO模式
GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // 输出方向
GpioDataRegs.GPBSET.bit.GPIO34 = 1; // 初始高电平是不是比手动查手册省事儿多了?更绝的是PWM模块,拖动ePWM1模块到画布,配置载波频率为10kHz。生成的代码里直接嵌入了死区补偿算法,看看这个占空比设置函数:
EPwm1Regs.CMPA.half.CMPA = (Uint16)(EPwm1Regs.TBPRD * dutyCycle);这种寄存器级的精准控制,连老司机都得写半小时的代码,Simulink点几下就搞定了。最近有个项目用这个套路驱动步进电机,模型里用Stateflow做了个S曲线加速算法,代码生成时自动展开成switch-case结构,实测比手写代码节省了40%开发时间。

通信方面玩得更溜,CAN模块配置界面直接可视化设置ID和邮箱。重点看生成的接收中断服务函数:
__interrupt void canISR(void){
CanRegs.CANRMP.bit.RMP31 = 1; // 清中断标志
RecvData = CanRegs.CANMDL31; // 读取数据
}这种寄存器操作级别的代码,Simulink自动处理了繁琐的位操作。实测在28335上跑CAN通讯,误码率比手动编写的驱动还低,底层库的稳定性确实靠谱。
搞电机控制的兄弟肯定关心FOC算法实现。用Simulink的PMSM模块搭建磁场定向控制模型时,注意在Clarke变换模块里勾选"单精度浮点优化"。生成的代码会自动调用DSP库的IQmath函数:
_iq ClarkA = _IQmpy(PhaseA, _IQ(0.6667));
_iq ClarkB = _IQmpy(PhaseB, _IQ(0.3333));这种定点数优化处理,让算法在28335上跑出了堪比DSP专用芯片的效果。有个做无刷电机驱动的案例,用自动生成的代码实现了15000rpm转速控制,速度环响应时间控制在2ms以内。
最后说个坑:用ADC模块时记得在模型里插入软件触发信号。有次生成代码后发现采样率上不去,查了半天发现是没配置SOC触发源。正确姿势是在ADC模块属性页勾选"Software trigger",这样生成的代码才会自动配置SOC寄存器:
AdcRegs.ADCSOCFRC1.bit.SOC0 = 1; // 触发采样这种隐藏配置项真是让人又爱又恨。总的来说,Simulink+28335的组合把嵌入式开发的门槛拉低了好几个level,特别是做复杂控制算法时,可视化建模比纯代码调试直观太多了。不过要玩得转,得吃透TI的C2000硬件支持包,里头的模块配置玄机可不少呢。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)