APM32芯得 EP.36 | 解锁嵌入式开发的秘密武器:表驱动法让代码更聪明!
本文介绍了嵌入式C语言开发中的表驱动法和状态机技术。表驱动法通过将程序逻辑存储在表格(如数组或结构体数组)中,运行时查表执行,替代传统的if-else判断,使代码更简洁高效。文章阐述了表驱动法的优势:减少代码量、易于维护、执行效率高、扩展性强,并解释了其在嵌入式系统中的重要性。此外,还介绍了状态机的基本概念及其与表驱动法的结合方式。最后,通过APM32F407控制LED状态转换的实例,展示了如何用
如遇开发技术问题,欢迎前往开发者社区,极海技术团队将在线为您解答~
极海官方开发者社区![]() https://community.geehy.cn/
https://community.geehy.cn/
《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
目录
前言
大家好,今天我们要聊聊嵌入式C语言开发里一个特别有用的技术——表驱动法(Table-Driven Programming)。别看名字有点高大上,其实它就是一个简单又高效的编程思路,尤其在像APM32F407这样的MCU(微控制器)上特别好使。这篇文章我会用大白话把这玩意儿讲清楚,从它是什么、为什么要有它、有什么好处,到最后怎么用它写个简单的例程,所以我会尽量细致,把每个点都掰开了揉碎了讲。
1. 什么是表驱动法?
表驱动法,简单来说,就是一种“查表做事”的编程方法。想象一下,你去饭店吃饭,菜单上列好了菜名和价格,你不用跟服务员一个个问“这个菜多少钱,那个菜怎么做”,直接看菜单就知道答案。表驱动法也是这个道理:它把程序里的一些规则、逻辑或者行为提前写在一个表格里(在C语言里通常是数组或者结构体数组),程序运行的时候,根据输入或者当前情况去这个表格里找对应的答案,然后执行。
传统的编程方式可能是用一堆if-else或者switch-case来判断条件,比如“如果输入是A就干啥,如果是B就干啥”,但条件一多,代码就变得又长又乱。而表驱动法呢,就像是把这些条件和结果整理成一张表格,程序只需要“查表”就行了,不用写那么多判断语句。
1.1 一个简单的比喻
假设你要做一个计算器,能算加减乘除。传统的办法可能是:
if (操作 == '+') {
结果 = a + b;
} else if (操作 == '-') {
结果 = a - b;
} else if (操作 == '*') {
结果 = a * b;
} else if (操作 == '/') {
结果 = a / b;
}但用表驱动法,你可以先建个表格:

程序运行时,拿到操作符(比如+),直接去表格里找对应的函数来执行,代码就简洁多了。
2. 为什么要有表驱动法?
在嵌入式开发里,表驱动法可不是随便搞出来的,它是为了解决实际问题而生的。咱们得从嵌入式系统的特点说起:
- 资源有限:像APM32F407这样的MCU,内存(RAM)和闪存(Flash)都很小,CPU算力也不强。如果代码写得太复杂,占用的空间和计算时间都会增加,可能直接跑不动。
- 逻辑复杂:嵌入式系统经常要处理各种状态和条件,比如控制一个设备,可能有“开”“关”“闪烁”好几种模式,还要根据按键、传感器输入来切换,条件一多,传统的if-else就容易写成一团乱麻。
- 维护麻烦:开发嵌入式程序时,需求经常会变。比如客户今天说“加个新功能”,明天说“改下逻辑”,如果代码里全是if-else,每次改都得翻遍整个程序,容易出错。
表驱动法就像是一个“聪明管家”,它把这些乱七八糟的逻辑整理成一张表格,程序只需要照着表格做事,既省力又不容易出错。
3. 表驱动法有啥好处?
说了半天,表驱动法到底好在哪儿?咱们一条条来看:
- 代码简洁
用表格代替一堆条件判断,代码量直接少一大截。你看表格一眼就知道每个情况该干啥,不用在长长的if-else里找来找去。 - 易于维护
如果要改逻辑或者加新功能,只需要在表格里改几行数据就行了,程序的核心代码几乎不用动。比如你要加个新状态,直接在表格里加一行,不需要重新写一堆判断。 - 执行效率高
在MCU上,查表通常比跑一堆if-else快。为什么?因为查表就是从内存里取数据,速度固定,而条件判断得一条条比对,条件越多越慢。 - 可扩展性好
系统升级或者功能增加时,表格可以轻松扩展,不用担心代码结构崩掉。比如你原来有3个状态,后来要加到10个,表格多加几行就搞定。
总结一下,表驱动法就像是给程序装了个“导航仪”,告诉它“别瞎猜了,直接照着地图走”,既快又准。
4. 状态机简单介绍
在讲怎么用表驱动法之前,咱们先聊聊状态机(State Machine),因为后面例程里会用到它。别被名字吓到,状态机其实是个很直白的东西,尤其在嵌入式开发里特别常见。
4.1 什么是状态机?
状态机就是一个描述“事物当前状态和怎么变”的模型。举个生活里的例子:你家的灯有几种状态——“关”“开”“闪烁”,你按一下开关,它就从“关”变成“开”,再按一下变成“闪烁”,再按又变回“关”。这个过程就是状态机在工作。
在程序里,状态机通常有这几个部分:
- 状态(States):系统当前是什么情况,比如“关”“开”。
- 事件(Events):触发状态变化的东西,比如“按开关”。
- 动作(Actions):状态变的时候要干啥,比如“点亮灯”。
4.2 嵌入式里为什么用状态机?
嵌入式系统经常要控制东西,比如LED、电机、显示屏,这些东西都有不同的工作模式(状态),而且会根据输入(比如按键、传感器)来切换模式。用状态机来写代码,能让逻辑清晰,像画流程图一样简单。
5. 表驱动法和状态机怎么结合?
在嵌入式C语言里,表驱动法和状态机简直是“天生一对”。咱们可以用表格来记录状态机的所有规则,程序运行时根据当前状态和事件去查表,找到下一步该干啥。
5.1 基本步骤
- 列出状态和事件:先搞清楚系统有几种状态,可能发生什么事件。比如LED有“关”“开”“慢闪”“快闪”4种状态,事件有“按键按下”“定时器到时”。
- 建个表格:把每个状态和事件的组合写成表格,标明“遇到这个事件会变成啥状态,要干啥事”。这张表就是状态机的“说明书”。
- 程序查表:程序跑的时候,看看当前状态是什么,发生了啥事件,然后去表格里找对应的行,执行动作,切换状态。
这种方法把复杂的逻辑变成了“查字典”,简单又高效。
6. 用APM32F407写个例程:LED闪烁状态机
好了,理论讲了不少,咱们来点实际的。用APM32F407这个MCU写一个简单的例程:控制一个LED,通过按键切换它的闪烁模式(常灭、常亮、慢闪、快闪),用表驱动法结合状态机来实现。
6.1 硬件准备
- MCU: APM32F407。
- LED: 板载LED。
- 按键: 板载KEY。
6.2 功能目标
- 默认状态:LED常灭。
- 按一下按键:变成慢闪(每秒闪一次)。
- 再按一下:变成快闪(每0.2秒闪一次)。
- 再按一下:变成常亮。
- 再按一下:回到常灭。
- 循环往复。
6.3 设计思路
1. 定义状态和事件
状态:
STATE_OFF:LED常灭STATE_ON:LED常亮STATE_SLOW_BLINK:LED慢闪STATE_FAST_BLINK:LED快闪
事件:EVENT_KEY_PRESS:按键按下EVENT_TIMER:定时器到时(控制闪烁)
2. 设计状态转换规则
咱们用文字先把规则写出来:
- 常灭时:
- 按键按下 → 变成慢闪,LED先关掉。
- 定时器到时 → 啥也不干,还是常灭。
- 慢闪时:
- 按键按下 → 变成快闪,不用动LED。
- 定时器到时 → 翻转LED状态(亮变灭,灭变亮)。
- 快闪时:
- 按键按下 → 变成常亮,LED点亮。
- 定时器到时 → 翻转LED状态。
- 常亮时:
- 按键按下 → 变成常灭,LED关闭。
- 定时器到时 → 啥也不干,还是常亮。
3. 用表格表示
咱们把这些规则整理成一个表格:
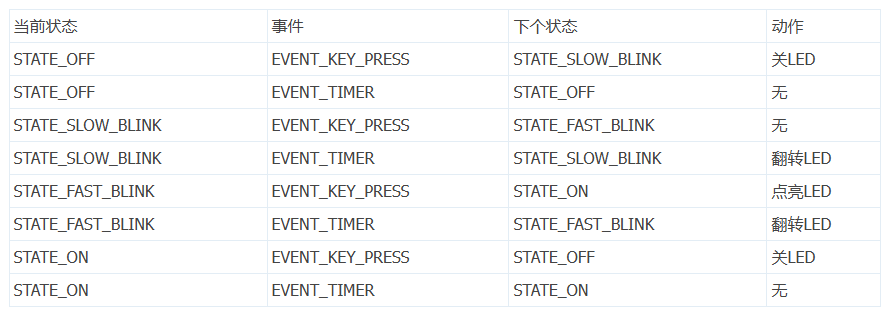
这张表就是咱们的“状态机说明书”,程序会根据它来做事。
4. 怎么写成代码?
在C语言里,咱们用结构体数组来实现这个表格。每个结构体记录一条规则,包括:
- 当前状态
- 事件
- 下个状态
- 要执行的动作(用函数指针表示)
程序运行时,拿到当前状态和事件后,遍历这个数组,找到匹配的那一行,执行动作,更新状态。
7. 例程代码
/* Includes */
#include "main.h"
#include "Board.h"
#include "stdio.h"
#include "apm32f4xx_gpio.h"
#include "apm32f4xx_adc.h"
#include "apm32f4xx_misc.h"
#include "apm32f4xx_usart.h"
#include "apm32f4xx_tmr.h"
// 定义状态
typedef enum
{
STATE_OFF, // 常灭
STATE_ON, // 常亮
STATE_SLOW_BLINK, // 慢闪
STATE_FAST_BLINK // 快闪
} State;
// 定义事件
typedef enum
{
EVENT_KEY_PRESS, // 按键按下
EVENT_TIMER // 定时器到时
} Event;
// 定义状态转换结构体
typedef struct
{
State current_state; // 当前状态
Event event; // 事件
State next_state; // 下个状态
void (*action)(void); // 动作函数指针
} Transition;
// 动作函数
void turn_off_led(void) { APM_TINY_LEDOff(LED2); }
void turn_on_led(void) { APM_TINY_LEDOn(LED2); }
void toggle_led(void) { APM_TINY_LEDToggle(LED2); }
// 状态转换表
Transition state_table[] =
{
{STATE_OFF, EVENT_KEY_PRESS, STATE_SLOW_BLINK, turn_off_led},
{STATE_OFF, EVENT_TIMER, STATE_OFF, NULL},
{STATE_SLOW_BLINK, EVENT_KEY_PRESS, STATE_FAST_BLINK, NULL},
{STATE_SLOW_BLINK, EVENT_TIMER, STATE_SLOW_BLINK, toggle_led},
{STATE_FAST_BLINK, EVENT_KEY_PRESS, STATE_ON, turn_on_led},
{STATE_FAST_BLINK, EVENT_TIMER, STATE_FAST_BLINK, toggle_led},
{STATE_ON, EVENT_KEY_PRESS, STATE_OFF, turn_off_led},
{STATE_ON, EVENT_TIMER, STATE_ON, NULL}
};
// 当前状态
State current_state = STATE_OFF;
volatile uint32_t timer_counter = 0;
volatile uint32_t timer_threshold = 1000;
// 处理事件的函数
void process_event(Event event)
{
int table_size = sizeof(state_table) / sizeof(Transition);
for (int i = 0; i < table_size; i++)
{
if (state_table[i].current_state == current_state && state_table[i].event == event)
{
if (state_table[i].action != NULL)
{
state_table[i].action();
}
current_state = state_table[i].next_state;
if (current_state == STATE_SLOW_BLINK)
{
timer_threshold = 1000; // 1秒
}
else if (current_state == STATE_FAST_BLINK)
{
timer_threshold = 200; // 0.2秒
}
return;
}
}
}
// 主函数
int main(void)
{
// ... 初始化代码 ...
APM_TINY_LEDInit(LED2);
APM_TINY_PBInit(BUTTON_KEY1, BUTTON_MODE_GPIO);
// ... 定时器和串口初始化 ...
while (1)
{
// 检测按键
if (APM_TINY_PBGetState(BUTTON_KEY1) == BIT_RESET)
{
process_event(EVENT_KEY_PRESS);
delay_ms(50); // 防抖
while (APM_TINY_PBGetState(BUTTON_KEY1) == BIT_RESET); // 等待松开
}
}
}
// 定时器中断处理函数
void TMR2_IRQHandler(void)
{
if (TMR_ReadIntFlag(TMR2, TMR_INT_UPDATE) != RESET)
{
TMR_ClearIntFlag(TMR2, TMR_INT_UPDATE);
timer_counter++;
if (timer_counter >= timer_threshold)
{
timer_counter = 0;
process_event(EVENT_TIMER);
}
}
}
// ... 其他辅助函数 ...8. 例程怎么工作的?
8.1 启动
程序开始时,LED是常灭状态(STATE_OFF)。
8.2 按键
- 第一次按:查表,从
STATE_OFF跳到STATE_SLOW_BLINK,LED开始慢闪。 - 第二次按:跳到
STATE_FAST_BLINK,LED快闪。 - 第三次按:跳到
STATE_ON,LED常亮。 - 第四次按:回到
STATE_OFF,LED常灭。
8.3 定时器
在慢闪和快闪状态下,每次定时器到时就翻转LED,其他状态无动作。
实验现象
https://v.youku.com/v_show/id_XNjQ2MzgxNzc4OA==.html?spm=a1z3jc.11711052.0.0&isextonly=1
9. 表驱动法的妙处在这儿
你看这个例程:
- 逻辑全在表里:状态转换和动作都写在
state_table里,代码里没一堆if-else。 - 改起来方便:想加个“超快闪”状态?在表里加几行就行,不用动主逻辑。
- 效率高:查表比判断快,MCU跑起来不费劲。
10. 疑问:如果后面要在这份代码上加一个功能,好加吗?
我这份代码是用表驱动法和状态机设计的,所以扩展性很强,加新功能是相对容易的。下面我详细跟你说说为什么好加,以及具体怎么加,拿“呼吸灯”状态举个例子。
10.1 为什么好加?
我的代码用的是表驱动法和状态机,这俩组合起来就像搭积木,结构清晰,扩展方便。
- 状态机把程序分成一个个独立的状态。
- 表驱动法把状态之间的转换和动作都写在一个表格里,想加新功能,只要往表格里加几行就行。
这种设计的好处是,代码的可维护性和扩展性特别高。
10.2 举个例子:加一个“呼吸灯”状态
1. 定义新状态
在State枚举里加一个STATE_BREATH。
typedef enum {
// ... 其他状态 ...
STATE_BREATH // 呼吸灯,新加的状态
} State;2. 定义新动作
“呼吸灯”效果需要用PWM实现。先写一个动作函数breath_led来调整亮度。
void breath_led(void) {
// 此处应为PWM调光代码
// 为演示,这里仅作示意
}3. 更新状态转换表
在state_table里加入新规则。比如从STATE_ON按键跳到STATE_BREATH,再按一下回到STATE_OFF。
Transition state_table[] = {
// ... 原来的规则 ...
{STATE_ON, EVENT_KEY_PRESS, STATE_BREATH, breath_led}, // 新增
{STATE_BREATH, EVENT_KEY_PRESS, STATE_OFF, turn_off_led}, // 新增
// ... 定时器事件 ...
{STATE_BREATH, EVENT_TIMER, STATE_BREATH, breath_led} // 新增
};你看,加一个新功能主要就是加状态、加动作、加规则这三步,核心的process_event函数完全不用改。
注意:动作函数的执行时间不宜过长,避免阻塞主循环。复杂的动作(如呼吸灯)最好在定时器中断里分步执行。
总结
表驱动法是个超级实用的技术,尤其在嵌入式C语言开发里。它通过把逻辑变成表格数据,让代码更简洁、好维护、跑得快。在状态机里用表驱动法,简直是如虎添翼,能把复杂的控制逻辑整理得井井有条。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 23
23 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)