JetPack SDK 深度解析:核心概念、组件、特性与实践
摘要: NVIDIA JetPack SDK是为Jetson嵌入式AI平台开发的完整工具包,包含主机端(Host)和目标端(Target)两大组件。主机端提供交叉编译工具链、CUDA工具包等开发工具,目标端则包含L4T系统、CUDA运行时、TensorRT等运行环境。文章详细解析了JetPack的核心组件(CUDA、TensorRT、VPI等)及其硬件加速原理,展示了CUDA示例代码和交叉编译方法
📖 推荐博主书籍:《Yocto项目实战教程:高效定制嵌入式Linux系统》
🎥 更多学习视频请关注 B 站:嵌入式Jerry
JetPack SDK 深度解析:核心概念、组件、特性与实践
1. 什么是 JetPack
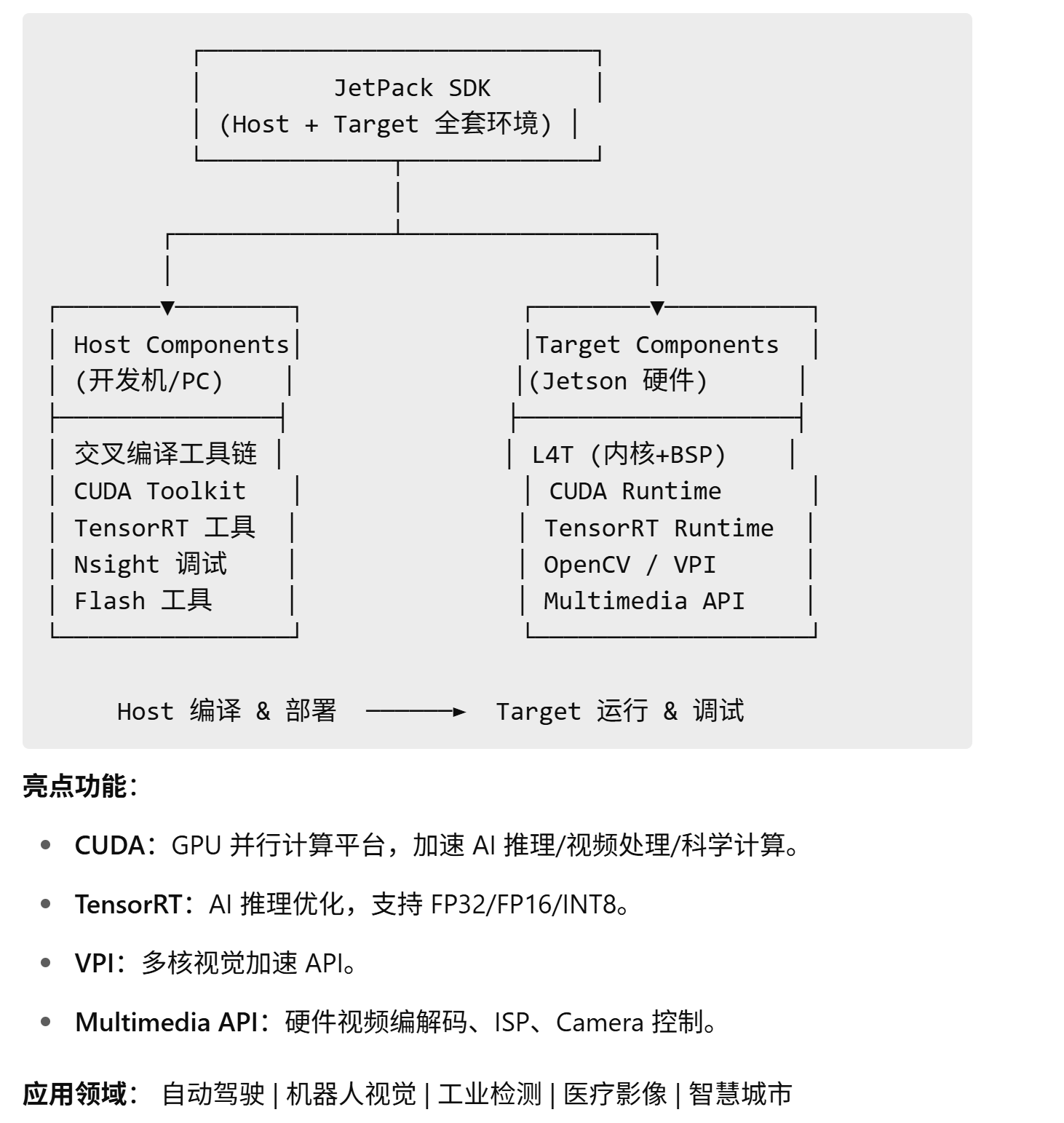
JetPack SDK 是 NVIDIA 专为 Jetson 系列嵌入式 AI 平台推出的完整软件开发包(Software Development Kit)。它整合了开发、编译、部署和运行所需的全部工具与库,支持 AI 推理、计算机视觉、GPU 加速、多媒体处理等功能。JetPack 同时包含 Host 端 与 Target 端 环境,保证开发机与目标硬件的一致性。
2. JetPack 的两大部分
2.1 Host Components(主机端)
运行在 Ubuntu x86_64 上,用于开发与交叉编译:
- 交叉编译工具链:如
aarch64-linux-gnu-gcc,编译 ARM64 可执行文件。 - CUDA Toolkit(Host 版):用于在 PC 上编译 CUDA 应用。
- TensorRT Host 工具:模型转换、性能测试工具。
- Nsight 调试工具:GPU 内核分析与调优。
- Flash 工具:
flash.sh,将 L4T 镜像烧写到 Jetson。
2.2 Target Components(目标硬件端)
运行在 Jetson ARM64 硬件上:
- L4T(Linux for Tegra):基于 Ubuntu,内核+BSP+驱动。
- CUDA Runtime:GPU 运行时支持,直接调度 Tegra GPU。
- TensorRT Runtime:高性能推理引擎,支持 INT8/FP16。
- OpenCV / VPI 库:计算机视觉算法加速。
- Multimedia API:硬件编解码、ISP、Camera 控制。
3. 核心组件详解
3.1 CUDA
CUDA(Compute Unified Device Architecture) 是 NVIDIA 提供的并行计算平台和编程模型,让开发者用 C/C++/Python 编写 GPU 程序。它的核心作用:
- 通用计算加速:利用 GPU 数千个核心同时处理任务。
- AI 模型加速:深度学习推理和训练。
- 视频处理:实时转码、滤镜。
- 科学计算:矩阵运算、信号处理。
硬件功能:
- 访问 GPU 核心(CUDA Cores)。
- 使用共享内存、寄存器加速计算。
- 调用 GPU 硬件调度单元并行执行线程。
市场与应用:
- 自动驾驶、机器人视觉、医疗影像分析、工业检测。
3.2 TensorRT
- 模型优化与推理引擎。
- 支持多精度计算(FP32、FP16、INT8)。
- 减少延迟、降低内存占用。
3.3 VPI
- Vision Programming Interface。
- 调用 GPU、PVA、CPU 混合加速视觉算法。
- 典型应用:立体匹配、光流估计。
3.4 Multimedia API
- 访问 NVENC/NVDEC 硬编硬解引擎。
- 高帧率视频处理、Camera 捕获与 ISP 调用。
4. JetPack 工作流程逻辑图
4.1 Host 与 Target 协作
[Host PC] 交叉编译 CUDA/TensorRT 应用
│
▼
通过 SSH / SDK Manager 部署到
│
▼
[Jetson Target] 运行在 L4T 系统上,调用 GPU/ISP 等硬件加速
4.2 软件栈结构
应用层:AI 推理程序 / 计算机视觉应用
------------------------------------------
API & 库:CUDA / TensorRT / OpenCV / VPI
------------------------------------------
驱动层:GPU 驱动 / ISP 驱动 / 多媒体驱动
------------------------------------------
内核 & BSP:L4T 内核 + NVP驱动 + 设备树
------------------------------------------
硬件:Jetson GPU / ISP / NVENC / PVA
5. 安装方法
CLI 安装 Host 端示例
sdkmanager --cli --action install \
--login-type devzone \
--product Jetson \
--version 6.2.1 \
--target-os Linux \
--host \
--downloadfolder ~/nvidia/sdk_downloads
6. CUDA 简单示例
#include <cuda_runtime.h>
#include <iostream>
__global__ void add(int *a, int *b, int *c) {
int idx = threadIdx.x;
c[idx] = a[idx] + b[idx];
}
int main() {
int a[5] = {1,2,3,4,5};
int b[5] = {10,20,30,40,50};
int c[5];
int *d_a, *d_b, *d_c;
cudaMalloc(&d_a, 5*sizeof(int));
cudaMalloc(&d_b, 5*sizeof(int));
cudaMalloc(&d_c, 5*sizeof(int));
cudaMemcpy(d_a, a, 5*sizeof(int), cudaMemcpyHostToDevice);
cudaMemcpy(d_b, b, 5*sizeof(int), cudaMemcpyHostToDevice);
add<<<1,5>>>(d_a, d_b, d_c);
cudaMemcpy(c, d_c, 5*sizeof(int), cudaMemcpyDeviceToHost);
for(int i=0; i<5; i++)
std::cout << c[i] << " ";
std::cout << std::endl;
cudaFree(d_a); cudaFree(d_b); cudaFree(d_c);
return 0;
}
交叉编译到 ARM64:
aarch64-linux-gnu-g++ -o add_cuda add_cuda.cu --cuda-path=/usr/local/cuda
7. 市场应用
- 自动驾驶感知与规划。
- 工业检测缺陷识别。
- 医疗影像病灶检测。
- 智慧城市交通与行为分析。
8. 总结
JetPack 是 Jetson 平台的核心软件生态,包含 Host 和 Target 两端的完整链路。理解 CUDA、TensorRT、VPI 等核心组件的用途和硬件映射关系,能帮助开发者在 AI、计算机视觉和多媒体领域快速落地高性能应用。
📖 推荐博主书籍:《Yocto项目实战教程:高效定制嵌入式Linux系统》
🎥 更多学习视频请关注 B 站:嵌入式Jerry

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 23
23 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)